MP6500GUのステッピングモータの制御波形について(第1回)


Monolithic Power Systems(以下、MPS社)ではトランスレータと電流レギュレーションを内蔵したMP6500GUというStepper Motor Driverをリリースしており、MP6500GUの評価ボードとしてEV6500-U-00A (以下、Evaluation Boardと呼びます。)も用意しています。
今回、このEvaluation Boardを用いてMP6500GUからステッピング モータに出力される下記のA相/B相の波形測定を行いましたので2回に分けて測定結果について説明します。
第1回:4種類のステップ モードでステッピング モータを駆動した時の波形及びPWMの周波数と回転速度の関係
第2回:正転/逆転を連続実行した時の波形
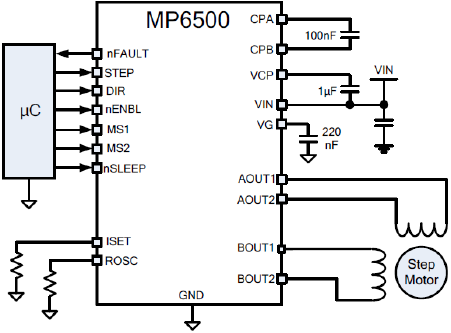
MP6500GUについて
 出典:Monolithic Power Systems, Inc.
MP6500 35V, 2.5A,Stepper Motor Driver
出典:Monolithic Power Systems, Inc.
MP6500 35V, 2.5A,Stepper Motor Driver
MP6500GUは、トランスレータと電流レギュレーションを内蔵したBipolar Stepper Motor Driverで下記の特長があります。
- 広い入力電圧範囲
- 4.5Vから35Vの広い電源電圧で動作
- 高出力電流
- 最大2.5Aのモーター電流を供給可能(基板設計や熱条件による)
- 多様なステップ モード
- Full、Half、Quarter、Eighthの各ステップ モードでBipolar Stepper Motor Driverを駆動
- 内蔵電流検出
- 電流検出は内部で行うため、外付けのセンス抵抗は不要
- 低オン抵抗
- 内蔵MOSFETのオン抵抗が低く(HS 195mΩ, LS 170mΩ)効率的な駆動を実現
- シンプルなインターフェース
- マイクロ コントローラと簡単なロジック インターフェースで接続でき、3.3V/5V ロジックに対応
- Automatic Current Decay
- 保護機能
- 過電流保護 (OCP) 、入力過電圧保護 (OVP) 、低電圧ロックアウト (UVLO) 、サーマル シャットダウン
- フォルト表示:
- 異常が発生した場合に、nFAULTピンを通じて外部に通知可能
Evaluation Board(EV6500-U-00A)の特長
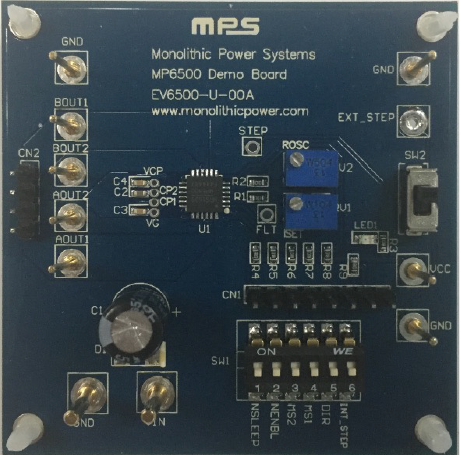 出典:Monolithic Power Systems, Inc.
MP6500Evaluation Kit EV6500-U-00A
出典:Monolithic Power Systems, Inc.
MP6500Evaluation Kit EV6500-U-00A
Evaluation Boardの主な特長は下記の通りです。
- 広範囲な入力電圧
- 4.5Vから35Vまでの幅広い電圧に対応
- 多彩なステップモード
- Full、Half、Quarter、Eighthの各ステップ モードをスイッチまたは入力ピンの電圧レベルで設定可能
- 正転/逆転の設定
- 正転/逆転をスイッチまたは入力ピンの電圧レベルで設定可能
- PWMの入力端子
- 外部からPWMを入力し、その周波数をもとにステッピング モーターを駆動
- Auto Decayのサポート
- モーターの動作を最適化するAuto Decayをサポート
- 保護機能
- 過電流保護(OCP)、過電圧保護(OVP)、過熱保護(OTP)の発生を通知するための出力ピン
※EV6500-U-00Aは、現在、製造中止となっています。後継機種としてEV6500-U-01Aがリリースされておりますので、評価される場合には、こちらのボードをご使用下さい。
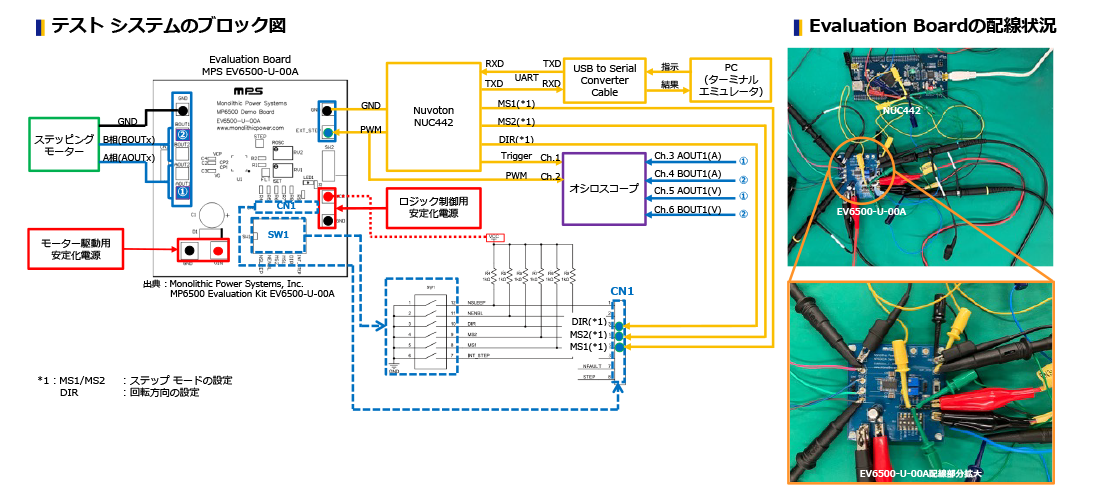
テスト システムのブロック図とEvaluation Boardの配線状況
テスト プログラム概要
Evaluation BoardからA相(AOUT1)/B相(BOUT1)への波形測定を行うにあたり、ステッピングモーターの回転に関する設定をマイコンの評価ボード(Nuvoton社製NUC442)から指示するテスト プログラムを作成し、このテスト プログラムから条件を変えながらEvaluation Boardが生成するAOUT1とBOUT1への波形をオシロスコープで測定しました。
作成したテスト プログラムの機能は下記の通りです。
- 回転方向(正転/逆転)の設定
- ステップ モード(Full Step、Half Step、Quarter Step、Eighth Step)の設定
- PWMの周波数の設定
- 回転角度の設定
設定した角度からステップ モードに合わせて回転に必要なパルス数を計算 - 1~4の設定内容をもとに回転に必要なPWMのパルスの送信
PWMのパルスを送信直前にI/OピンをHighにし、送信終了直後にI/OピンをLowにする処理を行っています。
このI/Oピンの立ち上がりをオシロスコープのトリガとすることにより、PWMのパルスを送信直前からの波形計測ができます。
なお、上記の1~5の命令はNUC442とUARTで接続したパソコンからターミナル エミュレータを用いて行っています。
測定した波形について
今回、測定した波形は下記の2種類です。
- 各ステップ モードでの360°回転時の波形
- Full Step、Half Step、Quarter Step、Eighth Stepの各ステップ モードで1KHzのPWMを用いてステッピング モーターを360°回転させた時の波形
- PWMの周波数と回転速度の関係
- Eighth Step Modeで1KHz、2KHz、4KHzのPWMの周波数での回転時の波形
全ての波形の測定はモーターが無負荷の状態で行っています。
各ステップ モードの概要は下記の通りです。

1.各ステップ モードで360°回転時の波形について
Full Step、Half Step、Quarter Step、Eighth Stepの各ステップ モードで1KHzのPWMを用いてステッピング モーターを360°回転させた時の波形を示します。
オシロスコープで計測した信号名は下記の通りです。
- Ch1 Trigger :
テスト プログラム内でPWMの生成中はI/OピンをHighに設定
このピンの立ち上がりを波形測定用のトリガ―として使用 - Ch2 PWM : マイコン内で生成したPWMの波形
- Ch3 AOUT1(A) : Evaluation BoardのA相のAOUT1端子の電流値(電流プローブで測定)
- Ch4 BOUT1(A) : Evaluation BoardのB相のBOUT1端子の電流値(電流プローブで測定)
- Ch5 AOUT1(V) : Evaluation BoardのA相のAOUT1端子の電圧値
- Ch6 BOUT1(V) : Evaluation BoardのB相のBOUT1端子の電圧値
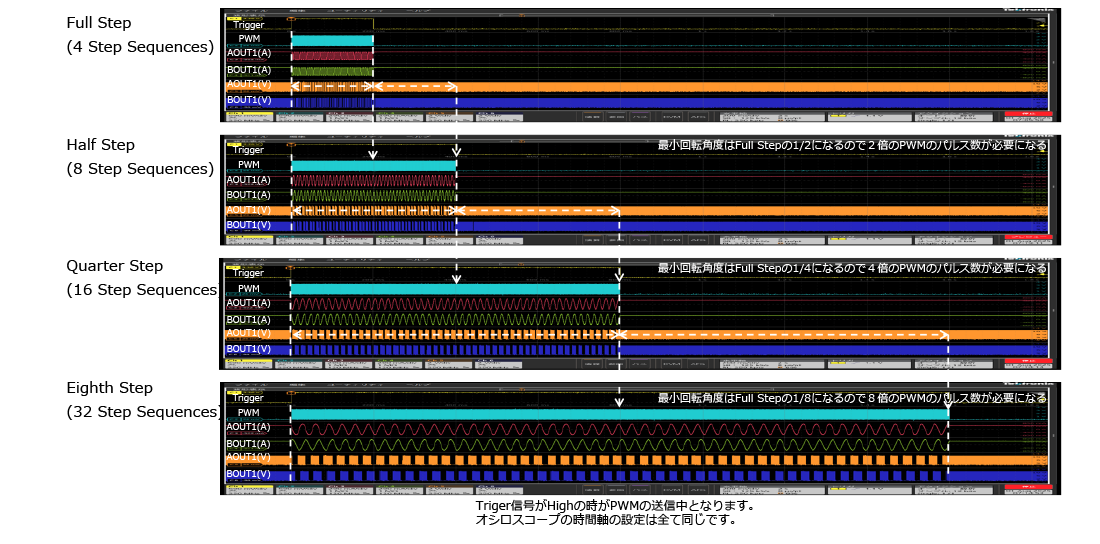
測定した波形から下記のことが確認できました。
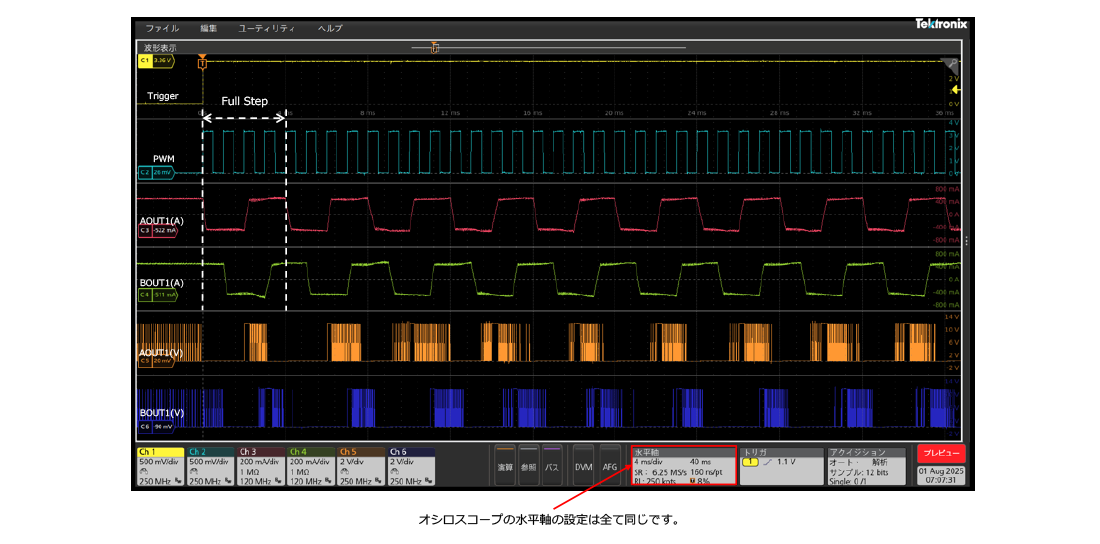
- Full StepではPWMの1パルスで回転するモーターごとに決まっているステップ角で回転する
- Full Stepで指定した角度まで回転させる時に必要なPWMのパルス数はステップ モードにより下記のようになる
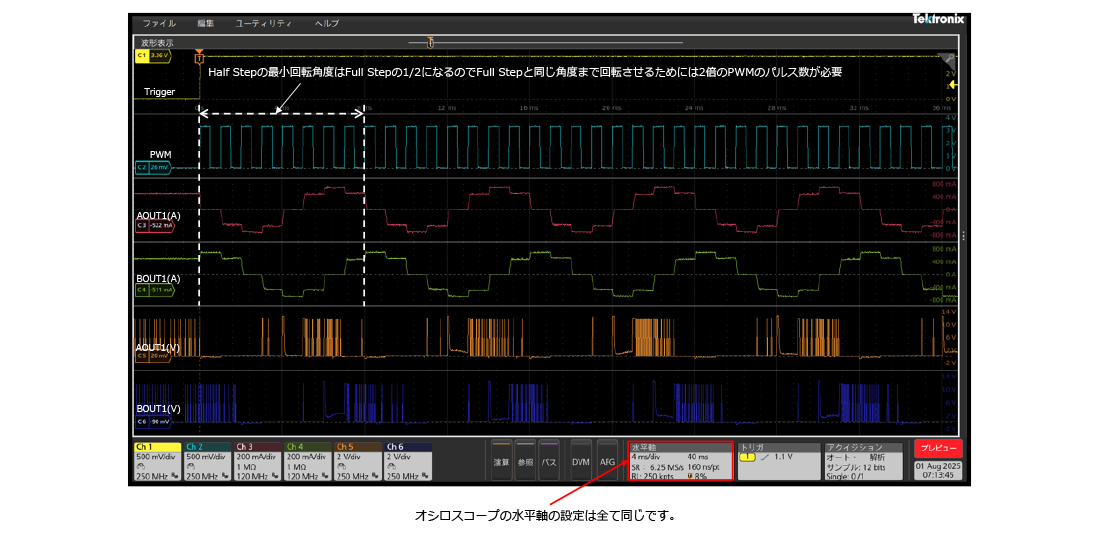
- Half Step : 最小回転角度はステップ角の1/2になるので2倍のPWMのパルス数が必要
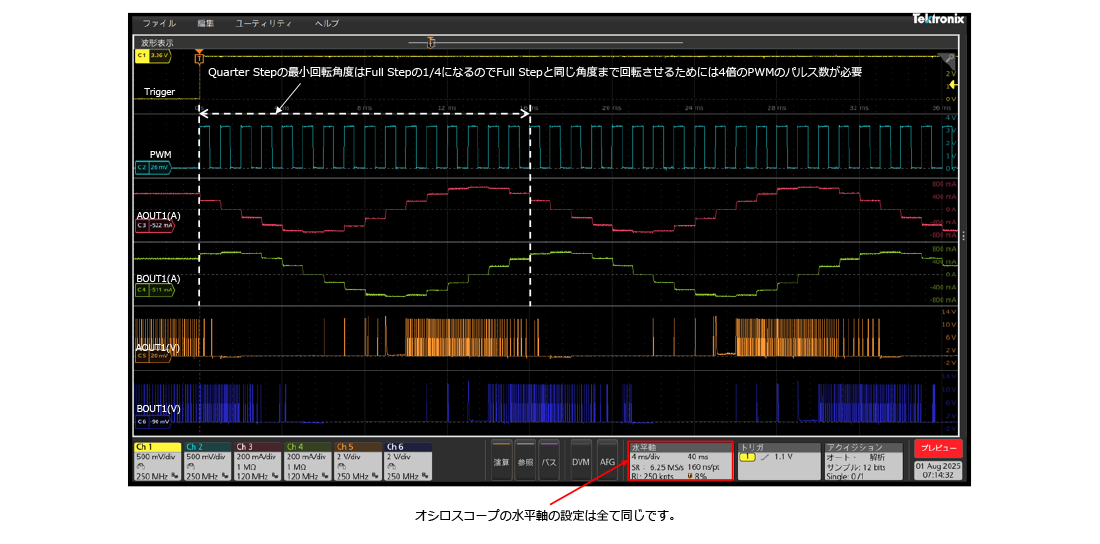
- Quarter Step : 最小回転角度はステップ角の1/4になるので4倍のPWMのパルス数が必要
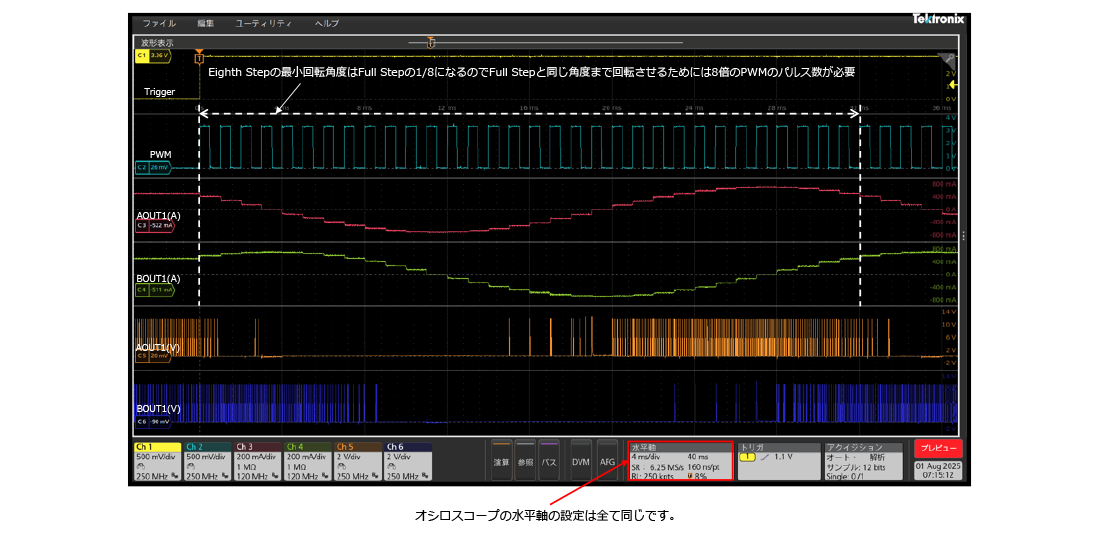
- Eighth Step : 最小回転角度はステップ角の1/8になるので8倍のPWMのパルス数が必要
- Full Step ModeからHalf Step、Quarter Step、Eighth Stepの各ステップ モードに、順次、変更していくと下記のようになる
- ステップ モータへの電流波形は方形波から正弦波に近い波形になっていく
- モーターの回転がスムーズになり回転音も静かになっていく
各Step Modeでの測定結果の比較(PWM:1KHz で 360°回転)
Full Step Modeでの測定結果の拡大(PWM:1KHz での 360°回転)
Half Step Modeでの測定結果の拡大(PWM:1KHz での 360°回転)
Quarter Step Modeでの測定結果の拡大(PWM:1KHz での 360°回転)
Eighth Step Modeでの測定結果の拡大(PWM:1KHz での 360°回転)
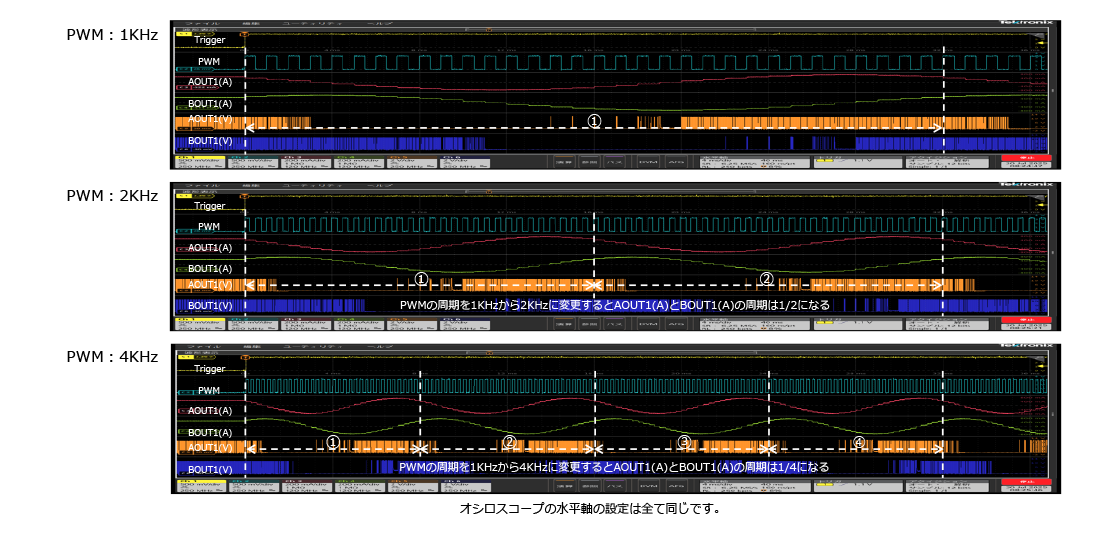
2.PWMの周波数と回転速度について
Eighth Step Modeで1KHz、2KHz、8KHzのPWMの周波数での回転時の波形を示します。
なお、この測定ではオシロスコープの時間軸は同じ条件となっています。
測定した波形から下記のことが確認できました。
- PWMの周波数を上げるとAOUT1(A)とBOUT1(A)の電流波形の周期も速くなる
- PWMの周期を1KHzから2KHzに変更するとAOUT1(A)とBOUT1(A)の周期は1/2になる
- PWMの周期を1KHzから4KHzに変更するとAOUT1(A)とBOUT1(A)の周期は1/4になる
- 電流波形の周期が速くなるにつれステッピングモーターの回転も速くなる
PWMの周波数と回転速度について
まとめ
今回は、テスト プログラムを用いてMP6500GUのFull Step、Half Step、Quarter Step、Eighth Stepの各ステップ モードでステッピングモーターを360°回転させた時とPWMの周波数を速くした時のAOUT1(A)とBOUT1(A)の波形と確認した内容について説明しました。
第2回では、テスト プログラムを用いて正転/逆転を連続実行した時のAOUT1(A)とBOUT1(A)の波形について説明します。