MP6500GUのステッピングモータの制御波形について(第2回)


Monolithic Power Systems(以下、MPS社)ではトランスレータと電流レギュレーションを内蔵したMP6500GUというStepper Motor Driverをリリースしており、MP6500GUの評価ボードとしてEV6500-U-00A (以下、Evaluation Boardと呼びます。)も用意しています。
第1回ではEvaluation Boardを用いてMP6500GUがサポートしている4種類のステップ モードの測定波形とPWMの周波数と回転速度の関係について説明しました。
今回は、第2回としてテスト プログラムを用いて正転/逆転を連続実行した時のEvaluation Boardからステッピングモーターに出力されるA相/B相の波形について説明致します。
※ MP6500GUやEvaluation Board、テスト システムの構成等についてはMP6500GUのステッピングモータの制御波形について(第1回) をご参照下さい。
3.正転と逆転を続けて実行した時の波形について
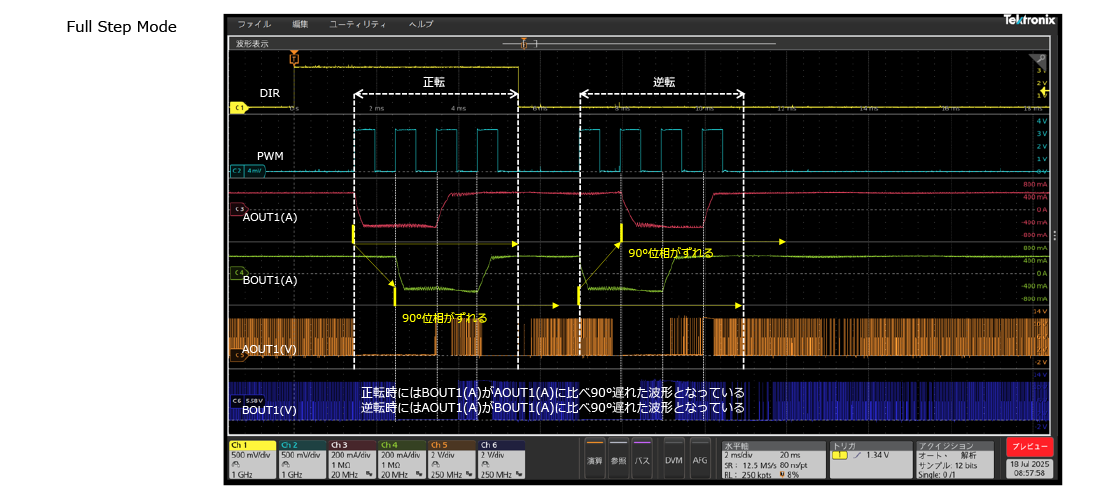
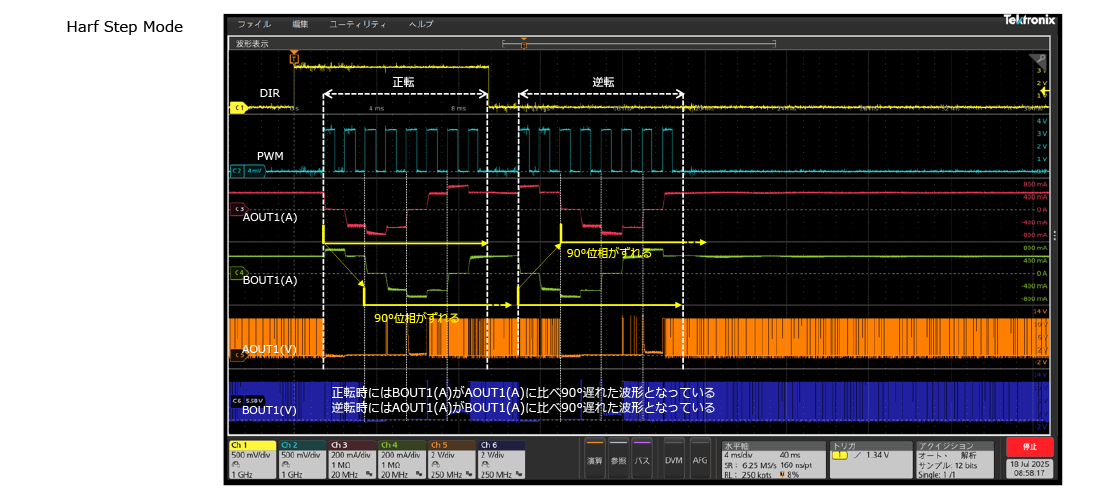
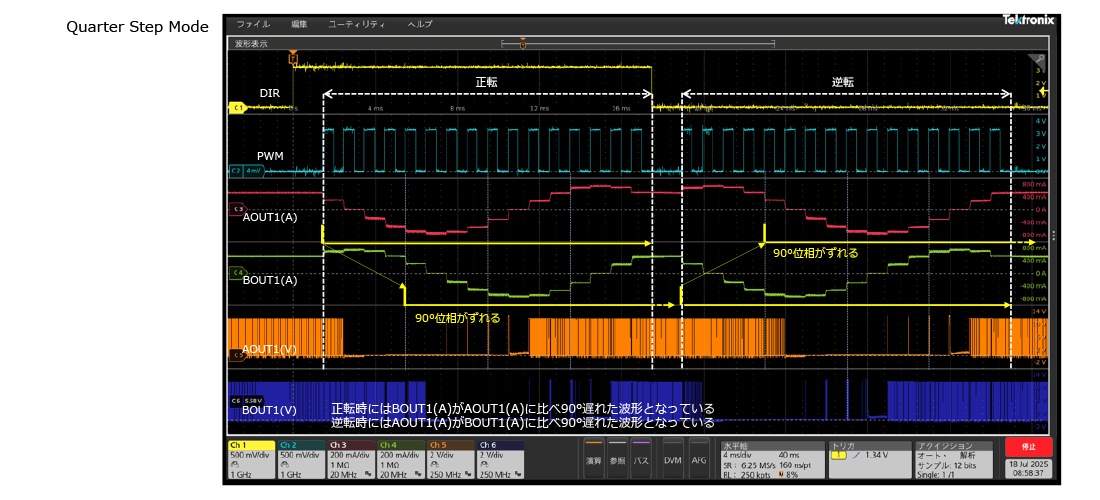
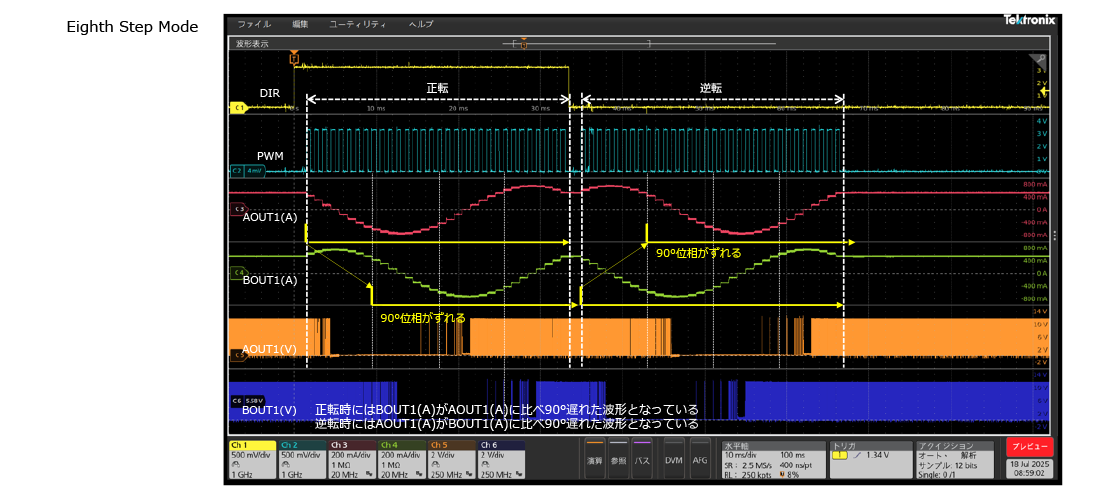
ステッピングモーターをFull Step、Half Step、Quarter Step、Eighth Stepで正転と逆転を続けて実行した時の波形を示します。
測定した波形はFull Step(ステップ角 x 4)の正転、逆転とその回転角度に相当するHalf Step、Quarter Step、Eighth Stepの波形になります。
MP6500GUでは正転と逆転をDIRピンで設定しますが、本資料ではDIRピンをHighに設定した時を正転、Lowに設定した時を逆転とします。
正転時には、今回、使用したステッピングモーターは正面から見て右回転(CW : Clock Wise)となります。
また、今回の測定ではオシロスコープのトリガー用の信号をDIRピンに変更し、DIRピンの立ち上がりを測定用のトリガ―に使用しています。
また、DIRピンのHigh/Lowにより正転/逆転時の波形の識別ができます。
- 正転時にはBOUT1(A)がAOUT1(A)に比べ90°遅れた波形となっている
- 逆転時にはAOUT1(A)がBOUT1(A)に比べ90°遅れた波形となっている
正転と逆転を続けて実行した時の波形について
まとめ
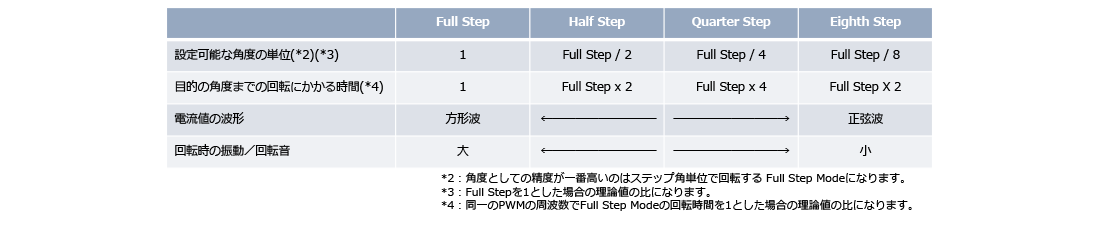
- 各ステップ モードの比較は下記の通りです。
- PWMの周波数を上げると、それに比例してステッピングモーターの回転が速くなる
- 正転時には、BOUT1(A)がAOUT1(A)に比べ90°遅れた波形、逆転時には、AOUT1(A)がBOUT1(A)に比べ90°遅れた波形となる
- Evaluation BoardをEnableにしている限り、ステッピングモーターは停止した角度で自己保持力が発生する
いずれの内容もステッピングモーターの構造や仕様から想定できる内容ですが、実施に動作している波形を確認することにより、改めて理解することができました。
※ EV6500-U-00Aは、現在、製造中止となっています。後継機種としてEV6500-U-01Aがリリースされておりますので、評価される場合には、こちらのボードをご使用下さい。
補足情報
MP6500GUにPWM波形を入力することにより、PWMの周期をもとにステッピングモータを簡単に指定した角度まで回転させることができます。
MP6500GUでステッピングモーターを指定した角度まで回転させるために必要なパルス数をPulseとするとPulseは下記の式から求めることができます。
- Pulse = Target Angle / Step Angle x Step Mode
- Target Angle : 回転させたい角度
- Step Angle : モーターのステップ角
- Step Mode : MP6500GUのステッピング モードごとの係数
Full Step : 1
Half Step : 2
Quarter Step : 4
Eighth Step : 8
この式をもとにマイコンの評価ボードで回転させたい角度に相当するPWMのパルス数を計算し、Evaluation BoardのEXT_STEP端子に入力することによりステッピングモーターを指定した角度まで回転させることができます。
例えば、モーターのステップ角が1.8°、Step ModeがEighth Stepで360°回転させたい場合には、
Pulse = 360° / 1.8° x 8
となり、360回転に必要なPWMのパルス数は1600となります。
担当エンジニアからの一言
テスト プログラムでは、プログラム内でPWMの周期やステップ モードや回転方向(正転/逆転)を設定しながらステッピングモーターを回転させ、A相/B相の波形を測定しました。
ただ、テスト プログラムを作成しなくてもEvaluation Boardのスイッチでステップ モードや回転方向を設定し、ファンクション ジェネレータからPWM波形(方形波)をEXT_STEP端子に入力することにより、ステッピングモーターを回転させることができます。
そして、ファンクション ジェネレータのBurstモード等で回転させたい角度に相当するパルス数をEXT_STEP端子に入力することにより、ステッピングモーターを意図した角度まで回転させることができます。
ステッピングモーターを使用するアプリケーションをご検討する際には、ぜひMP6500を始めMPS社製Stepper Motor Driverのご検討をお願いいたします。
関連リンク
商品別
- 半導体・電子部品
- アンプ
- 音声合成
- セキュリティ
- その他(ASSP(特定用途向け))
- クロック
- ゲートドライバ
- MOS-FET
- SiC/GaN (FET/Diode)
- IGBT
- ダイオード
- TVSダイオード
- サイリスタ・トライアック
- ヒューズ
- バリスタ
- 有線インターフェイス
- トランス
- インダクタ
- 抵抗
- コンデンサ
- 無線インターフェイス
- ボード間
- 筐体間
- 高周波
- その他(コネクタ・スイッチ)
- 放熱
- オーディオ
- その他(その他)
- アイソレーション
- マイコン・プロセッサ
- モータドライバ
- 電源
- RF・マイクロ波
- センサー
- USB
- イーサネット
- LVDS・SerDes
- ビデオ・オーディオ
- その他(有線インターフェイス)
- ASIC・FPGA・PLD
- メモリ
- ディスプレイ
- ASSP(特定用途向け)
- ディスクリート
- 保護素子
- 受動部品
- コネクタ・スイッチ
- オペアンプ
- その他(半導体・電子部品)
- WLAN・コンボ
- Bluetooth・BLE
- NFC・RFID
- その他(無線インターフェイス)
- アイソレーションリレー
- デジタルアイソレータ
- 8Bit・16Bit
- ARM
- AI・DSP
- フルブリッジ
- ブラシレスDC
- ステッピング
- レギュレータ・LDO
- スイッチングDCDC
- 複合電源(PMIC)
- LEDドライバ
- バッテリマネージメント
- その他(電源)
- ミリ波
- アンテナ
- リアルタイムクロック
- 水晶発振器・発信子
- 温度・湿度・環境
- 加速度・モーション・ジャイロ
- 近接・ToF
- 圧力センサ
- 磁気センサ・ホール素子・電流
- 光電センサ
- ポジション(位置・角度)
- その他(センサー)
- FPGA
- PLD
- ASIC
- その他カスタム
- DRAM
- FLASH
- その他(メモリ)
- 電子ペーパ
- LCDパネル
- ソフトウェア
- クラウド
- エンタープライズソフトウェア
- 組込ソフト
- セキュリティ
- OS・開発ツール
- 計測・測定・表示機器
- 測定機器・計測機器
- テスタ・モニタリング
- ディスプレイ・DLP
- その他(計測・測定・表示機器)
- 検査・分析機器
- 検査機器(破壊・非破壊)
- 解析機器
- その他(検査・分析機器)
- ICTソリューション
- ネットワーク機器
- ストレージ機器
- シミュレータ・テスタ
- サーバ
- ICT機器
- サービス
- セキュリティ
- その他(ICTソリューション)
- 組立・ロボティクス
- 組立・実装装置
- 産業用ロボット
- サービス用ロボット
- その他(組立・ロボティクス)
- レーザー・光学部品
- レーザー加工・微細加工
- 半導体レーザー
- LED・光ランプ
- ランプ
- 白色LED
- 波長別LED
- その他(レーザー・光学部品)
- 組込コンピュータ
- CPUモジュール
- 産業用マザーボード
- Mini-ITXボード
- 小型SBC
- VME/VPXボード
- 産業用PC
- パネルコンピュータ
- 拡張ボード
- カメラおよび周辺機器
- CPUボード
- 組込システム
- その他(組込コンピュータ)
- 特定用途向け・その他
- IP・ライセンス
- 組込モジュール
- ドライビングシミュレータ
- RF・マイクロ波コンポーネント
- ソーラー・太陽電池系
- サービス
- 開発委託・セミナ・検収・メンテナンス等
- 医療機器
- 医療機器