53100Aが実現!高精度周波数源の位相雑音・アラン分散の評価

本技術ブログは、Microchip社の「53100A」を用い、高価な機器群をこれ1台に集約して高精度発振器(OCXO)を安価かつ簡単に評価できることを実証しています 。市販の10MHz OCXOを対象に、GPS信号源を基準として評価を行った結果、位相雑音や短期安定度などの主要スペックの検証に加え、周波数調整範囲の確認や精密な校正も迅速に完了しました 。特にウォームアップ試験では、温度安定直前に発生した微細なノイズバースト(過渡現象)までも捉え、高い測定能力が示されました 。結論として、53100Aと付属ソフトTimeLabの組み合わせは、最小限のセットアップとコストで、実験室レベルの精密な特性評価と校正を実現するソリューションです 。
測定目標:DUTの包括的な性能評価53100A
市販の10MHzダブルオーブン型水晶発振器(DUT)を例に、53100Aと付属のTimeLabソフトウェアを用いた具体的な測定手順とその結果をご紹介します。このデバイスの代表的な位相雑音性能値と、その他いくつかの重要な仕様を下記図1、表1に示します。
そして、今回の測定では、以下の5つ操作を実行します。
- 位相雑音性能の確認: データシート記載の位相雑音値(例:1 Hzで-105 dBc/Hz)を満たすか検証します 。
- 短期アラン偏差の確認: τ=1秒で2E-12という短期安定度を検証します 。
- 周波数調整範囲の確認: 周波数制御(EFC)電圧による調整範囲(>±2.5E-7)を確認します 。
- GPSを基準とした周波数校正: 基準信号源を用いてDUTの出力周波数を精密に校正します 。
- ウォームアップ時間の確認: 電源投入後15分以内に、周波数偏差が±5E-8以内に収まるか測定します。
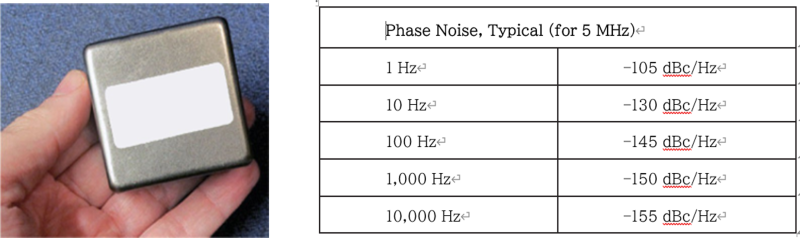 左) 図1: 測定対象 右) 表1:位相雑音性能
左) 図1: 測定対象 右) 表1:位相雑音性能
機器のセットアップとノイズ対策の重要性
単一の被測定デバイス(DUT)を、ユーザーが用意した単一の基準信号源と比較して測定する場合、53100Aの前面にあるSMAジャンパーは、 下記図2に示す工場出荷時のデフォルト構成で接続されている必要があります。
53100Aのフロントパネルにある「DUT」と表示されたN型(メス)ジャックを、測定対象の発振器に接続します。
このDUTは、電源入力と10MHz出力の両方に半田付けされており、周囲にある偶発的な10MHzのノイズ源からのクロストークを避ける注意が必要です。私たちがこれから行う測定は非常に繊細なものであり、テストフィクスチャや接続ケーブルの品質は、測定対象デバイスそのものと同じくらい重要になることがあります。たとえば、同軸RF出力を持つデバイスでも、OCXO(恒温槽付水晶発振器)の電源入力ピンに、追加のRFデカップリングが必要となるケースがあります。
この特定の発信器は、シールド性の高い金属製の筐体に収められています。周波数校正のために、電子周波数制御(EFC)入力ピンには10ステップのポテンショメーターが接続されています。53100AのDUT入力ジャックへの接続には、二重シールドのRG-400同軸ケーブルを使用します。
 図2: 53100Aの前面パネル
図2: 53100Aの前面パネル
基準信号源の接続
REFERENCEと表示されたジャックは、ユーザーマニュアルの「基準信号源の選択」セクションに記載されている適切な基準信号源に接続する必要があります。今回の測定では、低ノイズバージョンのMicrochip GPS-3500を10MHzの基準信号源として使用します(図3)。GPS-3500はその位相雑音とアラン分散の仕様が、DUTに期待される性能よりも上回るため、特に適した選択肢と言えます。また、GNSSで調整されているため、DUTの規定されたエージングレートよりも大きく下回る不確かさレベルで校正するため、校正用の周波数標準としても機能します。
最良の結果を得るためには、基準信号源とDUTの両方が、1MHzから200MHzの範囲にある正弦波信号源であり、+5dBmから+15dBmの電力レベルで動作する必要があります。高性能なノイズ測定では、平均化時間を短縮し、ノイズフロアを下げるため、この範囲の上限に近い出力レベルが望ましいとされています。今回のDUTの出力レベルはわずか+7dBmですが、期待される位相雑音レベルが53100Aのノイズフロアに近くないため、これは問題になりません。同様に、GPS-3500の出力レベルは約+10dBmであり、このアプリケーションには十分です。
DUTの接続と同様に、基準信号源の接続にも、優れたRFアイソレーションと位相安定性の特性を持つケーブルを使用する必要があります。二重シールド同軸ケーブル、コンフォーマブルケーブル、ハンドフレックスケーブル、または高いシールド効果を持つその他のケーブルタイプが推奨されます。基準信号源とDUT間のクロストークは、位相雑音プロットに予期せぬ低周波数スプリアスとして現れる可能性があり、アラン分散プロットでは、ビート周波数に対応する間隔でヌル(極小値)を伴う周期的なリップルアーティファクトを引き起こす可能性があります。これらの症状が現れないようにするには、120dBを超えるアイソレーションが必要となることがよくあります。
 図3: Microchip GPS-3000
図3: Microchip GPS-3000
テストマスクの定義
この例では、TimeLabのデフォルト設定に変更を加える必要はありません。しかし、テスト要件に合格/不合格の評価が含まれている場合は、DUTの1つまたは複数のリミットラインを定義すると便利かもしれません。今回のシナリオでは、表1からオフセットと値をmasks.txtにコピーすることで、DUTの位相雑音マスクを定義します。表の項目は5MHzの部品向けに指定されていますが、DUTは内部に逓倍器を持つ10MHzバージョンであるため、示されているリミットに6dBを追加する必要があります。
結果として、masks.txtのエントリは以下のようになります。
mask Commercial DUT phase noise (typical)
P (1, -99) (10, -124) (100, -139) (1000, -144) (10000, -149)
マスクの使用に関するより詳しい情報については、53100Aマニュアルの「Masks」メニューの説明を参照してください。masks.txt ファイルを使って、リミットラインの定義を作成・編集できます。
53100Aの測定ダイアログの操作
imeLabを起動した後、53100Aの測定ダイアログを開きます(Acquire>Microchip 53100A)。表示されるダイアログボックスは、以下の画像のとおりです。(図4)
53100Aで測定を実行したことがある場合、ダイアログの設定変更が保持されます。したがって、続行する前に「Restore Defaults(初期設定に戻す)」ボタンを押すことをお勧めします。これにより、メインダイアログと「Additional Options(追加オプション)」ダイアログの両方にあるフィールドとコントロールが工場出荷時の初期値に戻り、その後の変更の出発点となります。この演習における最初の位相雑音と安定性の測定では、測定ダイアログのデフォルトの制御設定を変更する必要はありません。
- TimeLabでは、機器の測定ダイアログにあるControls(コントロール)とInput(入力)フィールドの主要なドキュメントは、ダイアログ自体のマウスオーバーヘルプ機能です。このヘルプテキストは、現在実行中のソフトウェアとドライバのバージョンに合わせて更新されているという利点がありますので、見慣れないコントロールや機能がある場合、ヒントとして利用することができます。
- 左上の自由入力欄「Caption(表題)」と「Notes(メモ)」に、被測定デバイス(DUT)や基準源の名前、および測定に関するその他の関連詳細情報を入力することをお勧めします。これらのフィールドは、「Legend(凡例)> Select(選択)」ダイアログで対応するチェックボックスをオンにすることで、グラフ下の凡例テーブルに表示できます。
- デフォルトの測定時間は3分ですが、非常に低いノイズレベルや長いτ(タウ)区間が関わらないこのシナリオに適しています。
- デフォルトの測定帯域幅設定である50 Hz/100ポイント/秒では、位相記録は18,000ポイントのサイズとなり、ダブルプレシジョン(倍精度)で保存するために必要なRAMは(現代の基準から見て)わずか144 KBです。十分なメモリがあれば1週間以上の測定も実用的ですが、53100Aを使ったほとんどの測定タスクはわずか数分で完了できます。
- デフォルトの測定役割である「Measure Single DUT with Single External Reference(単一の外部基準源を用いた単一の被測定デバイスの測定)」は、先に示された工場出荷時のSMAジャンパー構成に対応するADCチャンネルを、被測定デバイス(DUT)と基準入力に割り当てます。他の測定役割については、追加のアプリケーションノートで説明されています。
- 「AM Noise(AMノイズ)」のチェックボックスはデフォルトで選択されています。このアプリケーションの例にはAMノイズ測定は含まれていないため、必要に応じてこの測定のチェックを外すことができます。不要な測定タイプを無効にすることは、CPUの性能不足により測定が途中で終了してしまう場合に役立ちます。
- 同様に、パフォーマンス上の問題が発生した場合、「Additional Options(追加オプション)」ダイアログで「Overlapped Acquisition(オーバーラップ取得)」のチェックを外すことも検討してください。これは安定性測定には影響しませんが、AMノイズや位相雑音測定では、特に近接したオフセットにおいて、特定のノイズフロアに到達するまでにかかる時間が増加します。この例では非常に低いノイズレベルを想定していないため、必要であれば「Overlapped Acquisition」のチェックを外しても、測定時間ほとんど影響はありません。
- 注記:「Overlapped Acquisition」は、FFTルーチンによる受信データの利用効率を大幅に向上させますが、CPU時間をより多く必要とします。その結果、位相雑音とAMノイズのトレースがより滑らかになります。これはデフォルトではオフになっています。
 図4: 53100Aの測定ダイアグラム
図4: 53100Aの測定ダイアグラム
位相雑音の測定
設定を終え、右側の「Start Measurement」(測定開始)ボタンを押すと、測定ダイアログボックスが閉じ、データの取得が始まります。10〜20秒以内に、結果のプロットがTimeLabに表示され始めます。
現在の「Measurement」メニューの選択内容によって、測定開始後にアラン分散のトレース、位相雑音のトレース、あるいは別の測定ビューが表示される場合があります。
最初のタスクは被測定デバイス(DUT)の位相雑音性能の確認ですので、以下の手順から始めることをおすすめします。
- Measurement>Phase Noise を選択します。 (または、単にPキーを押すだけでも構いません).
- 必要に応じて、テストマスク(この場合はMasks>Commercial DUT)を選択して、目的の位相雑音制限線を表示します。また、Shiftキーを押しながら位相雑音プロット上で左クリックして、目的のオフセットにノイズマーカーを切り替えることもできます。
- プロットの下にあるテーブルに表示する列を有効にするには、Legend>Select (d)を使用します。凡例テーブルの列は個人の好みの問題ですが、Trace、Notes、DUT Freq、Ref Freq、Input Amplitude、Elapsed、およびSpot Cursorがより一般的な選択肢です。測定にテストマスクが含まれる場合は、Mask ResultやMask Marginの列も選択するとよいでしょう。
- Legend>Selectダイアログを使用して凡例テーブルを設定した後、ウィンドウの境界をドラッグしてTimeLabのウィンドウサイズを調整するとよいかもしれません。フォントサイズも、Ctrl + マウスホイールまたは括弧キーをショートカットとして使用することで、Display>Increase/Decrease Font Sizeで簡単に調整できます。
- データ取得開始から1分も経たないうちに、位相雑音のトレースは、被測定デバイス(DUT)の性能を検証するために必要な最小オフセットである1 Hzに到達します。データ取得は、指定された3分間の測定時間の残りの間も継続され、クロススペクトル平均化プロセスによってさらなるノイズフロアの改善が得られます。その結果、関心のあるすべてのオフセットで十分な測定ヘッドルームを持つ、きれいで分散の少ないプロットが得られます(図5)。
グラフとその下にある凡例の「Mask Result」列を見ると、DUT(被測定デバイス)がこのテストのこの部分に合格したことがわかります。オシレーターのホワイトノイズフロアは仕様を満たしています。一般的な低レベルのACライン高調波を除いて、スプリアス信号は見られません。60Hzと120Hzのスプリアスはソフトウェアによって正しく認識されているため、ノイズマスク違反にはなりません。
興味深いことに、この例の近傍ノイズは、要求される仕様よりも優れています。実際、もし1Hzでのノイズがもっと低ければ、典型的なノイズレベルが-114 dBc/Hz付近のGPS-3500でさえ、DUTを正確に特性評価するには十分なクリーンさではない可能性があります。そのような場合には、デュアルリファレンス構成が必要になるかもしれません。53100Aの測定フロア推定値は、トレースの下にある影付きの領域で見ることができ、ほとんどのオフセットで10dB以上のマージンがあることがわかります。複数の保存されたプロットをTimeLabに読み込んで相互に比較する場合など、表示の clutter (乱雑さ) を減らすために、「Trace」>「Show Estimated Instrument Noise(F2)」でフロア推定をオフにすることができます。影付きの領域は、53100A自身のフロア推定のみを示しており、単一のリファレンスソースの制限は示していないことに注意してください。デュアル独立リファレンスソースを使用すると、この推定値にはリファレンスによって課せられるフロアの制限も反映されます。
DUT(被測定デバイス)の位相雑音測定値がリファレンスノイズレベルより10dB未満である場合、信号の位相雑音の最良の推定値を得るために、位相雑音測定値から補正係数を減算することができます。表2は、推奨される補正係数を示しています。
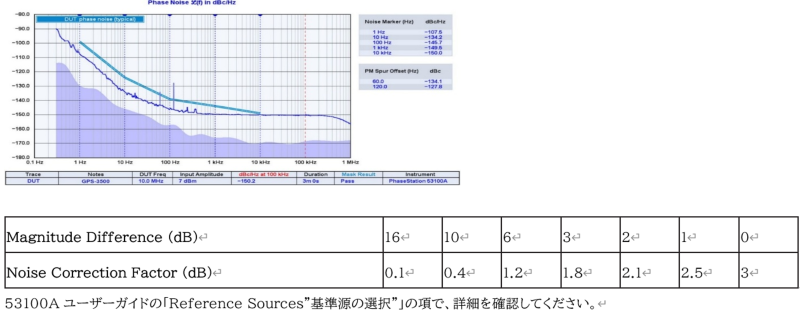 上) 図5: 位相雑音トレース 下)表2: 振幅差とノイズ補正係数
上) 図5: 位相雑音トレース 下)表2: 振幅差とノイズ補正係数
アラン分散の測定
アラン分散プロットには、テストマスクは必要ありません。これは、製造元のデータシートが周波数安定性を単一のτ間隔(τ=1秒)でのみ指定しているためです。位相雑音の表示を見ている間、ADEV測定はバックグラウンドで実行されていたので、ショートカットキー(Measurement>Allan Deviation)でADEVの表示に切り替えます。DUTの1Hz付近での位相雑音性能を考えると、工場出荷時のADEV仕様である2E-12 @ τ=1sも十分なマージンをもって満たしていることは驚くことではありません(図6)。
グラフ上の赤い「スポットカーソル」は、τ=1秒の列の近くを左クリックすることで配置されました。対応するADEV値は、グラフの下にある凡例の表に表示されます。実際、このスポットカーソルは、凡例の表で「Legend」>「Select」を選択して表示するように設定した場合にのみ表示されます。また、単に右側のチャートにある1秒のエントリを参照することもできました。
位相雑音のプロットと同様に、t=1sにおける被測定デバイス(DUT)の真のアラン分散は、ここでは最高クラスのルビジウム標準器のような単一の基準器だけでは特性評価が困難です。実際、ADEVトレースをよく見ると、t=0.7秒付近で、GPS-3500の内部ループ帯域幅と被測定デバイスの真の性能と思われるものとの間の遷移を見つけることができます。
メーザー発信機であればこの課題に対応できますが、53100Aは複数の基準器を用いた分離分散測定を実行できるため、GPS-3500を2台、あるいは他の高品質な発振器をわずかなコストでペアにすることでも同様に対応可能です。このアプローチについては、後のアプリケーションノートで詳しく説明します。
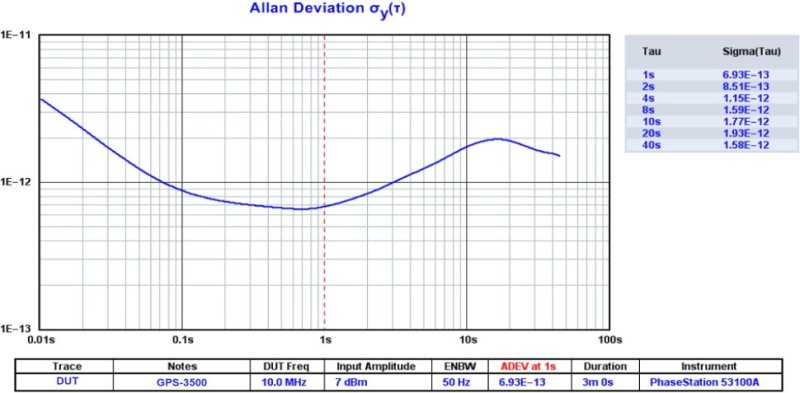 図6:アラン分散測定
図6:アラン分散測定
周波数可変範囲の測定
バラクタ制御水晶発振器やその他の電子調整可能な信号源の調整範囲は、電子周波数制御(EFC)電圧を指定された範囲で変化させることで得られる周波数偏差として定義されます。この例の被測定デバイス(DUT)の場合、制御電圧の範囲は0V〜+5Vで、これに対応する周波数調整範囲は±2.5E-7と指定されています。比周波数偏差を絶対値に換算すると、期待される調整範囲は10 MHz ±2.5 Hzです。
DUTの電子周波数制御(EFC)入力に10回転ポテンショメーターが接続されているため、53100Aで測定を開始し、「Measurement」>「Frequency Difference (f)」ビューに切り替えて、ノブを回しながらプロットを見ることで、調整範囲を簡単に確認できます。先に実行した位相雑音/ADEV測定の取得ダイアログに「Acquire」>「Microchip 53100A」で戻り、この測定をサポートするために測定帯域幅を広げる必要があります。考えられる設定の1つが図7に示されています。53100Aは安定した信号源を測定するように設計されているため、測定中にDUTまたは基準周波数が測定帯域幅のわずかな割合(通常は10%)を超えて変動すると、TimeLabはドリフト警告を報告します。デフォルトの測定帯域幅である50Hzから500Hz以上に切り替えることで、DUTの調整範囲が仕様よりも多少広いことが判明した場合(これは実際によくあることです)でも、これらの警告を回避することができます。
測定帯域幅を変更した後、「Start Measurement」を押して以前と同様に測定を開始し、今回は「f」のショートカットキーを押して「Measurement」>「Frequency Difference」の表示にアクセスします。測定が実行されたら、10回転ポテンショメーターを最小設定から最大設定まで調整すると、調整範囲が±2.5 Hzの要件を、十分な直線性(リニアリティ)と余裕をもって満たしていることがわかります(図8)。
- 測定を規定の3分間実行させるのではなく、コントロール範囲全体をスイープした後にスペースバー(Acquire > Stop/Repeat Acquisition)を押して測定を早期に終了させました。
- この種のテストでは、ノイズやアラン分散の表示から得られる有用な情報はあまりありません。原則として、線形ドリフト自体は位相雑音プロット上で1/f 6 の傾きとして現れますが、10回転ポテンショメーターの手動調整に伴う短時間のランダムな過渡現象は、PMおよびAMノイズの表示を台無しにする可能性があります。テストを実行する前に、AM NoiseとPhase Noise Measurementsのチェックを外しておくのは妥当ですが、必ずしもそうする必要はありません。
- データが正しく表示されるようにするための注意点: 周波数差のトレースの中心(ゼロ)基準線は、グラフの下にある凡例の表にある「DUT frequency」フィールドに表示されている周波数と一致します。この例では、「Measure Single DUT with Single External Reference」の役割に関連する周波数丸めモードが「Round to nearest 0.1 MHz」となっているため、この数値は単純に10MHzになります。
- 測定開始時にオシレーターの周波数が10MHzのゼロ誤差基準線に非常に近い場合、周波数差プロットを見る際に**「z」モード**(Trace > Phase/Frequency Traces Begin at Zero)が選択されていても問題ありません。しかし、ここではその仮定はできません。公称10MHz周波数の周りの対称的なチューニング応答を具体的に確認しているため、「z」モードはオフにする必要があります。
- 「r」モード(Trace > Show Linear Phase/Frequency Residual)についても同様です。このテストでは、トレンドラインを差し引かずに実際の周波数差プロットを見る必要があるため、「r」モードもオフにする必要があります。
- 周波数差トレースに沿った任意の特定の時点での絶対周波数を決定するのは簡単です。もし周波数カウントチャートが表示されていない場合は、Ctrl-n(Display > Numeric Table)を押して表示します。左クリックしてドラッグし、目的の時間に近いところで終わる周波数差トレースの垂直または長方形の部分を選択します。その後、マウスの中央ボタンを押したままにしてX軸に沿って移動すると、周波数カウントチャートは、全体のプロットの最後のデータポイントではなく、選択した領域の右端を基準とした様々な後続の平均化時間における絶対周波数を表示します。
- ズームインせずに特定の時間で周波数カウントチャートを検査するには、Shiftキーを押しながら左マウスボタンでドラッグして選択範囲を定義します。この選択範囲は、図9に示されているように、ドラッグ後もハイライトされたままになります。
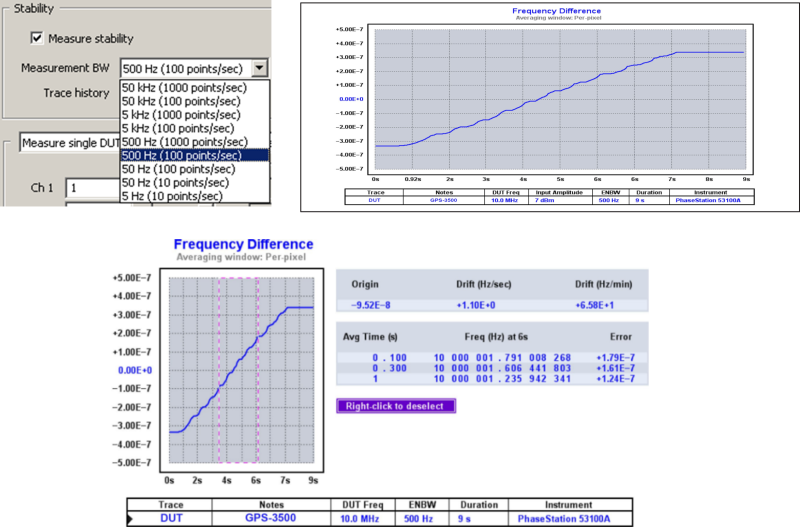 左上)図7: 測定帯域幅の選択 右上)図8:周波数差測定 下)図9:周波数差プロット.
左上)図7: 測定帯域幅の選択 右上)図8:周波数差測定 下)図9:周波数差プロット.
出力周波数の校正
53100Aの周波数測定精度は、そのリファレンスソースから受け継がれることを理解することが重要です。GPS-3500のようなGNSS準拠リファレンスは、それ自体がトレーサブルな校正標準として特性評価され、認定されることに留意してください。校正の役割で展開される場合、53100Aはデジタル位相比較器として機能し、その固有の不確かさは、すべてのGNSS準拠標準を含む、事実上利用可能なあらゆるリファレンスソースよりも優れています。同様に重要なこととして、53100Aは、指定された性能を維持するためにいかなる調整も必要としません。Acquire > Microchip 53100A Acquisition ダイアログから前回の測定を再開し、Measurement > Frequency Difference の表示を見ながら、10回転ポテンショメーターを調整して出力周波数をできるだけ10 MHzに近づけます。
図10では、DUTの出力周波数はリファレンスオシレーターに対して約±1E-10の範囲内に調整されています。
周波数差プロットではなく、周波数カウントチャートの短期平均を参照する方が、水晶発振器の調整が簡単であることがよくあります。なぜなら、大きなチューニング変化によってY軸のスケールが拡大され、小さな変化が見分けにくくなる可能性があるからです。もし周波数差測定ビューでカウントチャートが見えない場合は、上記のようにCtrl-n(Display > Numeric Table)を押して表示します。
前述したように、周波数差プロットを使って校正調整を行う際には、通常、rモード(residual)とzモード(zero-baseline)をオフにする必要があります。
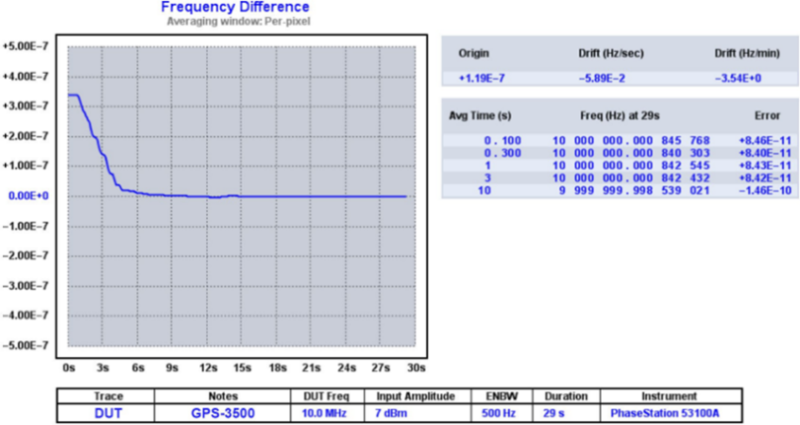 図10: 周波数差プロット
図10: 周波数差プロット
ウォームアップ挙動の観察
DUT の校正を終えた後、コールドスタートから15分後の比周波数偏差を評価することで、今回の演習を締めくくります。この15分間のウォームアップ期間の終了時までに、周波数は校正値の ±5E-8以内にある必要があります。これは10MHzにおいて0.5Hzに相当します。53100Aを使用すれば、15分の時点での周波数を必要な精度で測定できるだけでなく、発振器のウォームアップ期間のほぼ全体にわたる挙動を捉えることができます。この測定により、発振器が実際にウォームアップにどれだけの時間を要したか、電源投入後の最初の数秒で周波数がどれだけずれていたか、そしてウォームアップ期間中の全般的な挙動がどれほど安定していたかがわかります。予期せぬジャンプやドロップアウトがあれば、周波数差トレースで容易に発見できるでしょう。
「Acquire」>「Microchip 53100A」ダイアログを再度開きます(図11)。測定時間をデフォルトの3分から15分に延長する必要があります。また、OCXO(恒温槽付水晶発振器)のウォームアップ時のドリフトは数百ヘルツに及ぶことがあるため、利用可能な最も広い測定帯域幅(50 kHz)を選択する必要があります。
測定帯域幅を50 kHzに増やすと、いくつかの影響があります。1つは、データレートが毎秒10万ポイントになるため、位相データの記録サイズがすぐに扱いきれないほど大きくなってしまうことです。そのため、TimeLabは測定帯域幅が500 Hzを超えると、位相データを毎秒100ポイントまたは毎秒1000ポイントという、より扱いやすい間隔に間引きます。もう1つの影響は、アラン分散やその他の安定性測定におけるノイズフロアの増加です。いずれにしても、ウォームアップ中やその他の急激な非線形ドリフト期間中には、これらの特性を意味のある形で測定することはできませんので、ここでは問題になりません。同様に、このような条件下で位相雑音やAMノイズを測定する手間をかける必要もありません。
53100Aは信号がない状態では測定を開始できないため、発振器に電源を供給した後、できるだけ早く「Acquisition」ダイアログの「Start Measurement」ボタンを押す必要があります。その結果のプロットは、15分間の測定終了時点で、比周波数誤差が+3E-9未満であることを示しています(図12)。
補足として、もし選択領域が2つの垂直な列ではなく箱として表示される場合は、yキー(「Trace」>「Phase/Frequency Y Axis Unlocked in Zoom mode」)を押して、選択領域をX軸のみに制限することをお勧めします。
Y軸ロックは、ドラッグ操作の前、途中、または後に切り替えることができます。Y軸のロックを解除することは、トレースデータを詳細に確認する際に役立ちますが、その場合、垂直スケールの値が任意の数値となり、-5E-8の交点を探すのが難しくなる場合があります。
この周波数差プロットを見る際には、Trace > Show Linear Phase/Frequency Residual(r)と Trace > Phase/Frequency Traces Begin at Zero(z)モードをオフにする必要があります。
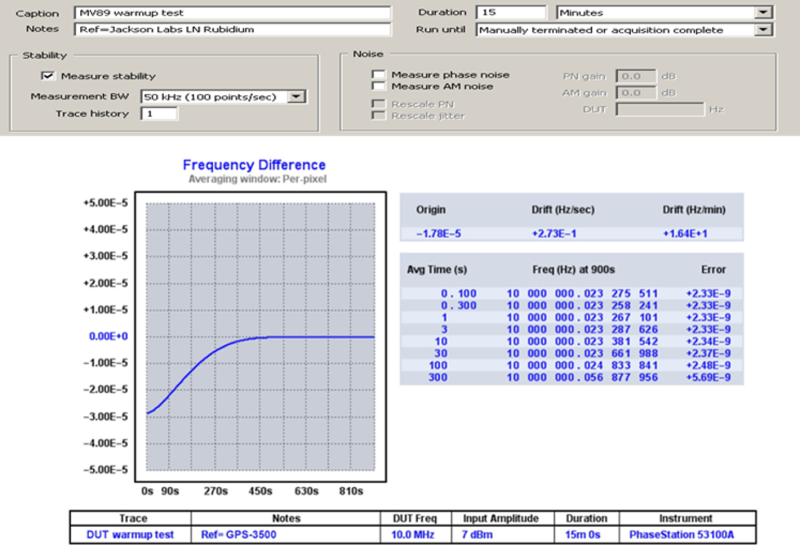 上)図11:Acquire>Microchip 53100Aのダイアログ 下) 図12:ウォームアップ期間
上)図11:Acquire>Microchip 53100Aのダイアログ 下) 図12:ウォームアップ期間
詳細の確認
DUTがウォームアップ精度仕様を初めて満たす時点付近の挙動を詳しく調べる価値があります。Y軸の範囲が1000倍も広いプロット上で、トレースが-5E-8を横切る点を探すことになります。そのため、図13に示されているように、左クリックしてドラッグし、ゼロ誤差基準線に近づくトレースの部分を選択してズームインする必要があります。左マウスボタンを離すと、ビューは上記に示した垂直カーソル間の指定された領域にズームします。これで、中央のマウスボタンをドラッグしてズームされた領域を水平に移動したり、スクロールホイールで拡大・縮小したりできるようになります。ヒント:Y軸のスケールは、トレースの表示されている部分に合わせて常に自動調整されます。この動作が不要な場合は、中央ボタンやホイールでズーム領域を操作しながら、Y軸のロックをオン/オフに切り替えることができます。
この場合、トレースが-5E-8の閾値を下回るのは、15分間のウォームアップ期間のうち約8分経過した時点であることがわかります(図14)。
その後間もなく、t+10分直前に、オシレーターのオーブンコントローラーが動作し始め、定常状態の温度に向かって安定し始めます。
上の図14では、数秒間続く、異常な過渡的なノイズ、または不安定な現象のバーストも見られます。このグリッチは、オーブン温度がピークに達する直前に発生しており、おそらく熱応力の結果として生じたものと考えられます。
中央のマウスボタンとホイールを使ってビューを拡大し、中央に移動させることで、より詳しく見ることができます。キーボードショートカットの「y」を使ってY軸のロックを解除すると、図15に示すように、この現象が垂直方向にも拡大表示されます。
この一過性の現象により、DUTは一時的にウォームアップ誤差の閾値である±5E-8を超えますが、オシレーターはすぐに通常の挙動に戻ります。15分間のトレースの残りの部分を注意深く調べると、この現象が再発しないことがわかります。
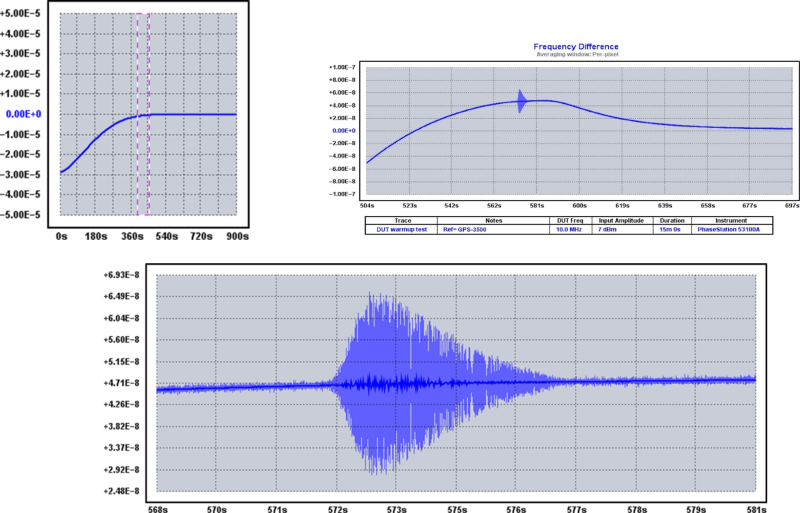 左上)図13:ズーム選択 右上)図14:異常な過渡ノイズバースト 下)図15:ズームされたノイズバースト
左上)図13:ズーム選択 右上)図14:異常な過渡ノイズバースト 下)図15:ズームされたノイズバースト