はじめての計測センサー



慣性センサーとは
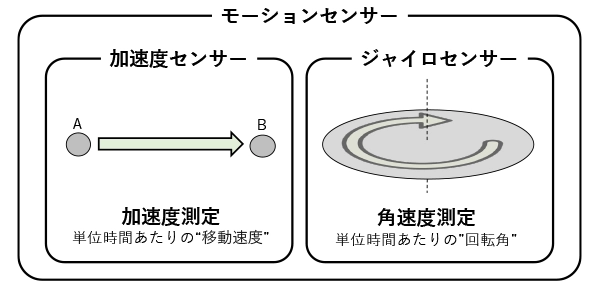
慣性センサーとは、いわゆる慣性の力を利用して動きを測定するセンサーであり、代表的なものとして加速度センサー、ジャイロセンサー、モーションセンサーがあります。
加速度センサーは、物体の移動速度が変化するときに発生する慣性の力を利用して加速度を検知します。
ジャイロセンサーは、慣性の力の一種である「コリオリの力」を利用して、物体の回転や向きの変化を角速度として検知します。
そして、モーションセンサーは加速度センサーおよびジャイロセンサーを組み合わせたもので、物体の動きをより複雑に(3次元的に)検知することが可能です。

このような慣性センサーはどのような製品に利用されているのでしょうか?
例えば、みなさんは車で目的地への道に困った時、カーナビゲーションを頼りにすることがあると思います。実は電波が届かないところでも加速度センサーで移動距離や速度を検知し、ジャイロセンサーで移動方向を検知することで正確に道案内をしてくれています。
このように、慣性センサーを応用することで物体の姿勢、方位、位置、速度などを計測することができるため、スマートフォン、カメラ、ゲーム機、またドローンや自動車運転支援等に幅広く利用されており、わたしたちの生活に非常に身近なセンサーといえます。
ところで、それぞれのセンサーはどのようなしくみで動作しているのでしょうか?
少し詳しく見ていきましょう。
加速度センサーのしくみ
加速度センサーには多くの種類があり検出方法も様々です。その中でも安定度が高く広く用いられている方式が静電容量型の加速度センサーです。静電容量型の加速度センサーは原理的にバネと重りを使用しており、重りの移動距離とバネ係数から加速度を検出しています。実際の内部回路では、重りに連動した検出素子部の静電容量が変化し、それを電圧に変換してデジタル化することで加速度の測定を行います。
ジャイロセンサーのしくみ
振動式のジャイロセンサーはすべてコリオリの力(転向力)を使って角速度を検知しています。コリオリの力とは、動く物体の回転系で現れる見かけの力であり、「回転運動中に並進運動を行うと横向きに現れる力」のことです。以下の原理イメージを見てみましょう。上向きの回転軸を持って物体が角速度ωで回転している時、物体が速度vで移動すると内部でコリオリの力 Fが発生します。つまり、このコリオリの力を計測できれば角速度が求められる、ということです。
このコリオリの力を検出するための方式として、主に静電容量方式が使用されています。以下の回路イメージのように、一定周期で振動が与えられている時、無回転の状態ではC1とC2の静電容量が等しくなります。そこに回転が加わるとコリオカの力が発生し、C1およびC2の静電容量が変化します。これらの静電容量の差分からコリオリの力を測定し、角速度を求めることができます。


測距センサーとは
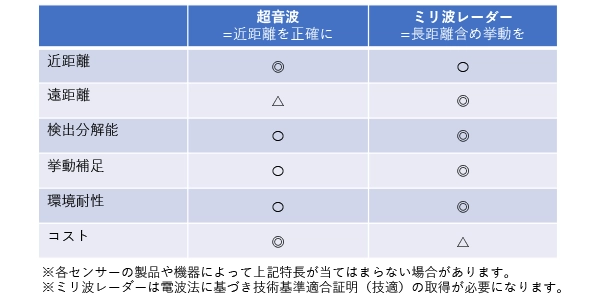
距離の測定にはどのようなセンサーが使われるのでしょうか? 様々な方式がありますが、今回は超音波センサーとミリ波レーダーセンサーをご紹介します。
超音波センサーは「超音波」、ミリ波レーダーセンサーは「ミリ波」と違いがありますが、どちらも「自ら送信波を出力し対象物からの反射波から測距」しており、それぞれ非接触で対象物の速度や距離などを検知・測定することが可能です。またこれらのセンサーは環境耐性に優れていることでも知られています。例えば、カメラでも非接触で距離や速度の測定は可能ですが、逆光や雨、霧、また同色では区別がつきにくい場合があります。一方超音波やミリ波はこのような環境下でも影響を受けにくいため、車載分野をはじめ産業分野でも活用されています。車載分野では超音波センサーをバックソナー(低速時の距離センサー)として使用したり、ミリ波レーダーセンサーをADASの前車追従や前方障害物の検知に使用しています。また産業分野においても、これらのセンサーをAGVやドローン、FA機器で使用したり、人の検知(見守り)などの用途で使用されています。