【eYs3D】自律走行搬送ロボット XINK-Base 50Cの概要と機能デモ


目次
1. XINK-Base 50Cについて

XINK-Base 50Cは、SLAM(自己位置推定と地図作成を同時に行う技術)を活用し、高度な自律移動が可能なAMRです。小型ながら最大積載量は50kgで、工場や倉庫において、人や障害物を的確に回避しながら自律的に移動し、搬送作業などの効率化に貢献します。
XINK-Base 50Cは、eYs3D社のコア技術を搭載した自律走行搬送ロボットです。
1. eYs3D社のXINKプラットフォームをベースとしたメインボードが、頭脳として採用されています。このコア技術により、高度な演算処理とROSベースのナビゲーション機能を実現しています。
【AI: Computer Vision】eYs3D XINK V2 プラットフォームのご紹介
【AI: Computer Vision】eYs3D XINK NANOプラットフォームのご紹介
2. 目の役割を担う、同社の高精度ステレオカメラが搭載されています。3D深度認識技術により、周囲の障害物を高精度に検知し、複雑な環境下でもより高度な自律移動を可能にしています。
2. XINK-Base 50Cの特徴
XINK-Base 50Cの主な特徴は以下の通りです。
- SLAM技術により、周囲の環境を認識しながら、自己位置を把握し、同時に地図を作成することができます。さらに、様々な外部システムや機器と連携するための仕組みを備えており、工場や倉庫における搬送作業の効率化をはじめ、多岐にわたる用途に活用できます。
- ROSベースのナビゲーションシステムと、高性能なLiDAR(最大測定距離25m、有効スキャン範囲270度)を搭載し、屋内環境の2Dマップを簡単かつ正確に作成します。
- 多様な場所で利用可能で、環境地図に基づいた経路計画によって制御される、信頼性の高い自律移動システムを搭載しています。障害物を検知すると、減速、停止、回避、経路修正、最適経路の選択、状況報告などの動作を自律的に実行します。
- WebSocket API(JSON形式のTCP通信)を介して、XINK-Base 50Cと外部システムを連携させるアプリケーションを開発でき、人間とロボットの協調作業において、作業者の介入を大幅に削減できます。ユーザーは、デモアプリケーションを使用してXINK-Base 50Cを操作することも可能です。
- 地図データのバックアップや復元機能を備えており、一度作成した地図データやロケーションの設定情報を、別の機体へ復元できます。これにより、複数台の導入や機体の入れ替えが必要な際も、現場での再マッピング作業を省略できます。
3. 製品概要
多彩なセンサーと高度な機能を搭載し、コンパクトな設計ながら最大積載量50kgを実現した自律走行搬送ロボットXINK-Base 50C。その主要な仕様と搭載機能の詳細は、以下の表をご覧ください。

仕様表
| 大項目 | 小項目 | 説明 |
|---|---|---|
| 本体 | 寸法 | 長さ 42cm、幅 40cm、高さ 23cm |
| 重量 | 13.5kg | |
| 最大積載量 | 50kg | |
| 積載プラットフォーム | VESA規格ネジ穴 (M5 x 15個) | |
| センサー | LiDAR | 周囲環境をスキャンし、マッピング、ナビゲーション、障害物を検出 |
| ステレオカメラ | 2個、対象物までの距離を測定し、障害物の検出 | |
| 超音波センサー | 7個 (背面含む)、対象物との距離を測定し、近距離の障害物を検出 | |
| IMU | 加速度と角速度を計測し、ロボットの姿勢制御や自己位置推定 | |
| 移動・駆動 | 移動速度 | 1m/s (最速) |
| モーター | BLDCハブモーター (2個)、50W x 2 | |
| 演算・制御 | CPU | ARM Cortex-Aクアッドコア + Cortex-M4 |
| OS | ROS 1 (Linux) | |
| 電源 | バッテリー | 14.4V/20.1Ah、8時間駆動 (50kg積載時)、6時間充電 |
| コネクター | RJ45 | Ethernet 1000Mbps |
| 電源供給 | AC 110V (最大100W) | |
| I/O | バッテリー電圧、電源制御、緊急停止、外部I/O | |
| USB | USB 2.0 5V供給のみ |
4. デモ動画
デモ内容
本デモは全4部で構成されています。
①地図作成:XINK-Base 50Cを矢印ボタンでマニュアル操作し、地図がリアルタイムで完成していく様子が確認できます。直感的なユーザーインターフェースを備えたAndroidデモアプリケーション「AMR Visual Design Tool」を使用しています。
②ロケーションとパトロール設定:作成した地図上に3か所のロケーションを設定し、それらを順番に巡回するパトロール設定をします。
③パトロール実行:設定した巡回ルートをXINK-Base 50Cが自動でパトロールする様子が確認できます。
その際、新たな障害物(人など)を検知して、迂回ルートで目的地へ向かいます。
④カメラ視点でのパトロール:XINK-Base 50Cに別途ステレオカメラを搭載し、その視点からの映像が確認できます。
G100+(G62よりも高性能)とステレオカメラ評価ツール「DMPreview」を使用しています。
デモ構成
このデモの接続構成は以下の通りです。
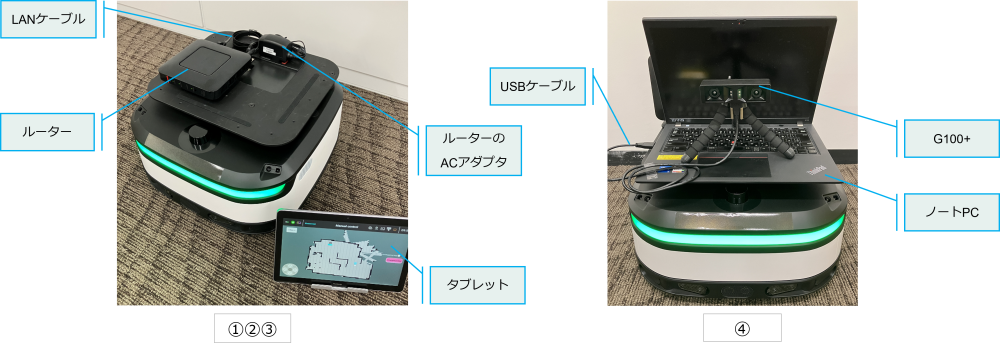
①②③タブレットによるXINK-Base 50Cの制御:タブレットでXINK-Base 50Cを遠隔操作します。ルーターとXINK-Base 50CはLANケーブルで接続し、タブレットはWi-Fiでルーターに接続します。
(XINK-Base 50Cにタブレットを搭載する方法もあります。
この場合は、USB-Ehernetアダプターを介して、タブレットのUSBポートとXINK-Base 50CのLANポートを接続します。)
④ノートPCによるG100+の制御:上記に加え、XINK-Base 50CにはノートPCと三脚に取り付けられたG100+が搭載されており、
これらはUSBで接続されています。
デモ動画
XINK-Base 50Cの自律走行テクノロジーおよび基本機能をご紹介します。
※デモ動画および上記写真では撮影当時のホワイト機体を使用していますが、XINK-Base 50Cの製品版の標準仕様はブラック機体となります。
5. まとめ
今回はXINK-Base 50Cの概要とデモ動画をご紹介しました。XINK-Base 50Cは、省人化や生産性向上といった課題解決に貢献する強力なツールです。コンパクトな設計は既存の環境への導入を容易にし、最大50kgの積載量は幅広い搬送ニーズに対応します。XINK-Base 50Cの動作を実際に見てみたいという方は、お気軽にご連絡ください。
関連商品
 eYs3D Microelectronics: 3DマシンビジョンとエッジAIで未来を拓く
eYs3D Microelectronics: 3DマシンビジョンとエッジAIで未来を拓く
 【AI: Computer Vision】eYs3D XINKデモを動かしてみた
【AI: Computer Vision】eYs3D XINKデモを動かしてみた

