エッジAI×ステレオカメラ「ダンボール検出・計測」ソリューション・デモ


目次
システム構成:eYs3D 社のトータルソリューション
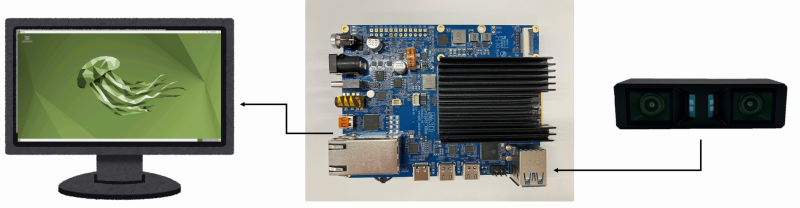
eYs3D社は、AIを司るSoCと視覚を司るISPの両方を自社開発しており、これらを組み合わせたソリューションに、特に強みを持っています。今回のデモシステムは、PCを介さず、ステレオカメラからのUSB入力をエッジAIプラットフォームで処理し、HDMIモニターへ出力するシンプルな構成で実現しています。
XINK NANO: エッジAIプラットフォーム
eYs3D社のSoC「eCV5546」を搭載しており、YOLO等のモデルを用いた人検知や顔認証を、高速かつ低消費電力で実行します。
G100+: ステレオカメラ
eYs3D社のISP「eSP876」を搭載しており、2つのイメージセンサーによる視差で、深度情報を生成するカメラモジュールです。メインプロセッサに負荷をかけず、高精度なDepthデータをリアルタイムに出力します。
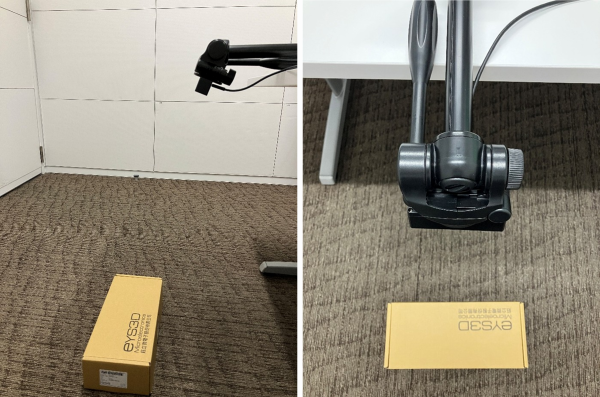
今回のデモにおける撮影環境は以下の通りです。カメラを取り付けた三脚を横にして、カメラが斜め下方向を向くように設置しています。カメラから床面(カーペット)までの垂直距離は約70cmです。
【解説】寸法を導き出すプロセス
設置角度に依存しない自由な計測を実現するため、AIによる認識技術とポイントクラウド(点群データ)を統合した、以下の5つのプロセスを実行しています。
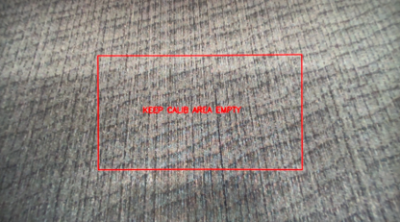
① 床面キャリブレーション
はじめに、何も置いていない床面をサンプリングし、カメラに対する床面の傾き(法線ベクトル)を算出します。これにより、カメラが斜めを向いて設置されていても、システムが自動で「床面(ゼロ地点)」を把握。正確な高さ計測のための基準面を定義します。
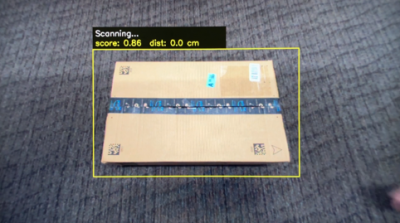
② AIによる対象検知
ダンボールを再学習したYOLOv8を用い、画像内から計測対象をリアルタイムに検知します。AIがバウンディングボックス(外枠)を生成することで、膨大な空間データの中から「どの範囲を計測に使うべきか(ROI:関心領域)」を動的に決定。背景のノイズを除外します。
③ 天面の高さ(H)の算出
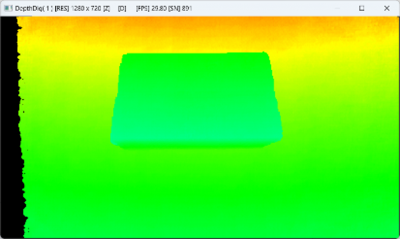
②のROI範囲内から、ダンボールの天面(上面)にあたる領域を抽出します。G100+が生成する高精度なDepthデータをベースに、天面と①で定義した床面との距離の差分を統計的に処理。ノイズや微細な変動を抑えることで、安定した高さ(H)を算出します。

④ 座標変換とポイントクラウドの構築
①で得た床面の傾き情報を使い、Depthデータを空間内の点の集合であるポイントクラウドへと展開し、数学的な座標変換(回転)を実行します。これにより、斜め設置のカメラであっても、内部的には「ダンボールを真上から見下ろしている状態」を作り出します。
⑤ 天面の縦横(L, W)の算出
④のポイントクラウドに対して、天面までの距離Zと焦点距離fから導き出される「1pixel=Z/f」という関係式を適用します。画像上のピクセル情報を物理的な長さへと変換することで、ダンボールの向きや置き方に依存することなく、L(縦)とW(横)を算出します。
※③と④はどちらも、GUIツール「DMPreview」の画面です。③はDepthデータ、④はポイントクラウドの真上からの視点を表しています。
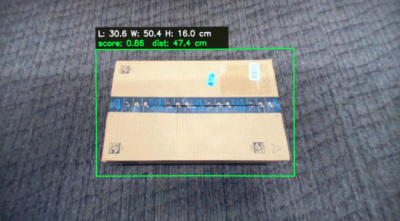
【デモ動画】実環境での対応力と精度検証
今回のデモ検証では、ダンボールの向きや大きさを変えながら、実測値との比較および追従性の確認を行いました。検出と測定は15fpsほどで処理を行い、各辺の誤差は概ね5mm以内、最大でも1cm程度に収まっていることが確認できます。
まとめ
今回はダンボールを例にしましたが、この「AIで見分け空間を測る」仕組みは、パレット上の積載量確認や資材の在庫管理など、多種多様な現場課題に応用可能です。XINK NANOとG100+が提供するソリューションは、小型化・省人化・自動化を目指す現場において、有効な選択肢となります。エッジAIやステレオカメラの導入をご検討している方、デモを見てみたい方は、ぜひお気軽にお問い合わせください。
関連商品
 eYs3D Microelectronics: 3DマシンビジョンとエッジAIで未来を拓く
eYs3D Microelectronics: 3DマシンビジョンとエッジAIで未来を拓く
 【AI: Computer Vision】eYs3D XINKデモを動かしてみた
【AI: Computer Vision】eYs3D XINKデモを動かしてみた

