慣性計測装置(IMU)の基本とセンサーデバイスとの違い

ドローン・工業機器の姿勢制御や、自動運転の制御などにおいて重要な役割を担う、角速度・加速度を高精度に計測する慣性計測装置(IMU:Inertial Measurement Unit)の基本と、IMUとセンサーデバイスとの大きな違いについて解説します。
慣性計測装置(IMU:Inertial Measurement Unit)とは
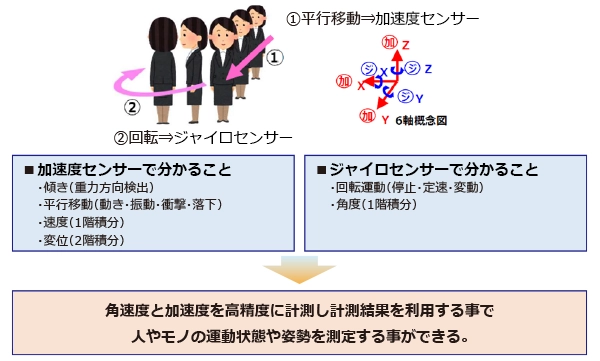
慣性計測装置(IMU:Inertial Measurement Unit)とは3次元の慣性運動(直行3軸方向の並進運動および回転運動)を検出する装置です。加速度センサー[m/s2]により並進運動を、角速度(ジャイロ)センサー[deg/sec]により回転運動を検出します。
センサーデバイスと慣性計測装置(IMU)の違い
実環境下ではさまざまな影響(実装基板の反り・振動・実装誤差・温度変化など)を受けるため出力データの精度が劣化しますが、慣性計測装置(IMU)は誤差を低減するさまざまな補正機能を搭載しており、高精度なセンシングデータを安定的に出力します。
 センサーデバイスと慣性計測装置(IMU)の誤差比較
センサーデバイスと慣性計測装置(IMU)の誤差比較

慣性計測装置(IMU)の性能について(高精度・高安定)
慣性計測装置(IMU)で特に重要視されるジャイロセンサーの安定性は、アラン分散(Allan Variance)で表現されています。アラン分散はセンサー出力の安定性(縦軸)を時定数(横軸)の関数として表現したもので、縦軸の値が小さいほど安定性が高いということになります。アラン分散で値が最も低くなる平らな部分の値は「バイアス安定性」[dph(=deg/hr)]とされ、センサーの安定性性能を表現する指標となります。FOG(Fiber Optical Gyro)などの高価なジャイロではバイアス安定性は1dphを下回ります。
 アランバリアンス図(ARW+Bias Instability)
アランバリアンス図(ARW+Bias Instability)
慣性計測装置(IMU)のアプリケーション例
慣性計測装置(IMU:Inertial Measurement Unit)は、姿勢制御を必要とする機器に搭載されています。
最近では、生産設備の予知保全や劣化診断や振動観測(地震、ビルの振動)等に応用されています。
- 自動運転:位置・姿勢検知
- 精密農業:トラクターの自動運転、アーム姿勢制御
- ドローン:姿勢制御
- アンテナ・カメラ振動検知/制御:アンテナ制振、カメラ制振
- 建設機器・鉱山機械:ブレード姿勢・角度制御、パワーショベルアーム制御
- 製造機器:異常振動検知、ロボットアーム姿勢制御
アプリケーションイメージ
- アプリケーション例:ロボットアーム
ロボットアームにM-G365を使用した場合の説明動画になります。

関連商品
慣性計測装置(IMU)の特長とラインナップおよび、関連した水晶加速度センサーに関する情報をご覧いただけます。
慣性計測装置(IMU)の特長と製品ラインアップ|セイコーエプソン株式会社


セイコーエプソン社の慣性計測装置(IMU:Inertial Measurement Unit)は、独自の微細加工技術を用いることで、高安定・低消費・低ノイズの特長をもつ高性能水晶センサー素子を使用した高精度な製品です。当ページではセイコーエプソン社のIMUの特長解説と製品ラインアップをご紹介します。
加速度センサーの基本と原理

3軸加速度センサーは加速度の測定を目的とした慣性センサーの1つで、3次元の慣性運動(直行3軸方向の並進運動)を検出する装置です。そのため、ビルや橋梁などの建造物の傾斜や地震時の傾きを計測することにもよく用いられます。当ページでは、加速度センサーの基本と原理、仕組みについて解説します。
水晶加速度センサーの特長と製品ラインナップ|セイコーエプソン株式会社

3軸加速度センサーは加速度の測定を目的とした慣性センサーの1つであり、3次元の慣性運動(直行3軸方向の並進運動)を検出する装置です。 セイコーエプソン独自の微細加工技術を用い低ノイズ・高分解能・高安定度の特徴をもつ高性能水晶センサー素子を使用した高精度な慣性計測装置です。