Moku | PID制御とは?






商品基礎情報
|
目次
●まとめ
|
PID制御の構成要素
PID制御は以下の3つの要素で構成されます。
- 比例制御(P制御)
現在の誤差に比例した制御量を出力します。
比例ゲイン(Kp)が大きいと応答が速くなりますが、過大な値にすると振動しやすくなります。 - 積分制御(I制御)
過去の誤差を積算し、それに基づいて制御量を調整します。
積分ゲイン(Ki)が適切でないと、オーバーシュートや遅れが発生することがあります。 - 微分制御(D制御)
誤差の変化率に基づいて制御量を調整し、急激な変動を抑えます。
微分ゲイン(Kd)が高すぎると、ノイズの影響を受けやすくなります。
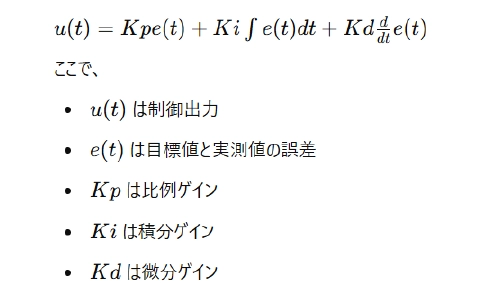
PID制御の動作原理
PID制御は、下記図の式で表されます。
なぜPID制御が必要なのか
PID制御(比例・積分・微分コントローラー)は、制御システムで非常に重要な役割を果たします。
精度の向上: システムの目標値(設定値)に対して実際の値を正確に追従させることができます。これにより、システムの精度が向上します。
安定性の確保:システムの応答を安定させるために使用されます。特に、外乱や負荷の変動がある場合でも、システムが安定して動作するように調整します。
応答速度の改善: システムの応答速度を改善し、目標値に迅速に到達するようにします。これにより、システムの効率が向上します。
汎用性:さまざまな種類のシステムに適用可能です。温度制御、速度制御、位置制御など、多くの分野で使用されています。
簡便性: 比較的簡単に設計・実装できるため、多くのエンジニアにとって使いやすいツールです。
これらの理由から、PID制御は多くの制御システムで広く使用されています。
PID制御のアプリケーション
PID制御はさまざまな分野で利用されています。
産業用ロボット:アームの位置制御
自動車:クルーズコントロール
空調制御:室温の調整
化学プラント:反応プロセスの制御
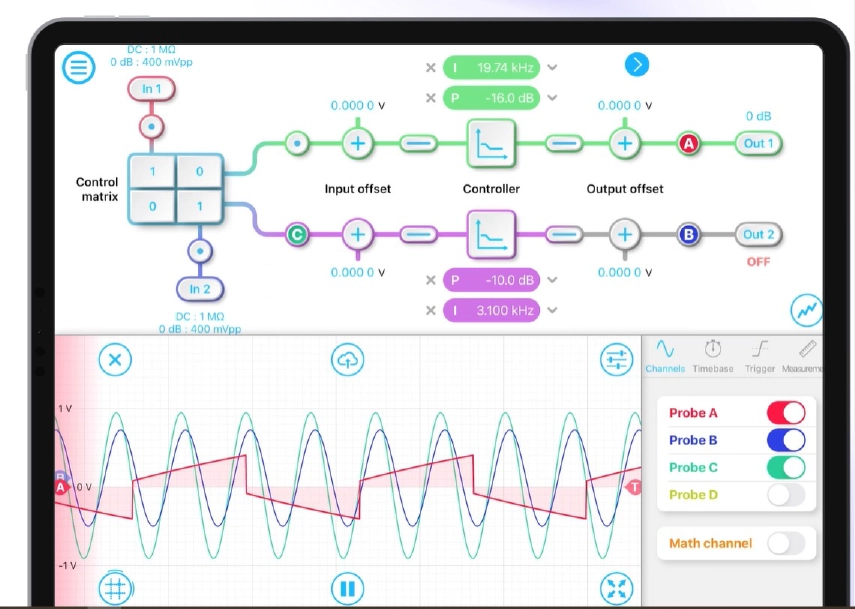
MokuのPID制御
- MokuシリーズのPID制御は、最大4つの独立したチャネルを持ち、リアルタイムでのゲイン構成や高度なマルチセクションPIDビルダーを備えています。 これにより、システムのフィードバックと安定化を簡素化できます。
- インタラクティブなボード線図を使用して制御システムの周波数応答を迅速に設計でき、信号経路全体で信号を監視するためのオシロスコープのプローブポイントが組み込まれています。 これにより、パラメータの調整と結果の表示を同時に行うことが可能です。
- 低周波と高周波のゲイン飽和を持つシングルまたはダブル積分器と微分器が含まれており、比例 (P)、積分 (I)、微分 (D)、二重積分 (I+)、積分飽和 (IS)、微分飽和 (DS)のゲインプロファイルを設定できます。
- マルチ機器モードで複数のMoku PID制御を展開することで、最大8つの独立した制御を取得できます。 接続をアナログ入力および出力にルーティングしたり、計測器をデジタル接続してロスレス計測器ケーブル接続を行ったりできます。
- Moku PID制御は、レーザーの温度や電流の安定化、圧力、力、流量の制御、スキャンヘッドやサンプルステージの位置決め、温度調節など、さまざまなアプリケーションに適しています。
Mokuの仕様、特長
Mokuには3種類のモデルがあり、各モデルによって測定できる周波数帯やサンプリング数が異なります。



まとめ
PID制御は、システムの精度、安定性、応答速度をバランスよく改善します。PID制御は多くの制御システムで広く使用されており、設計・実装が比較的簡単であるため、非常に有用です。
この機会にぜひ導入を検討してみてはいかがでしょうか。