ミリ波レーダーの基礎1 [距離・速度・角度検出について]


センシング原理の概要
図1に一般的なミリ波レーダーの構成およびセンシング原理の概要を示します。
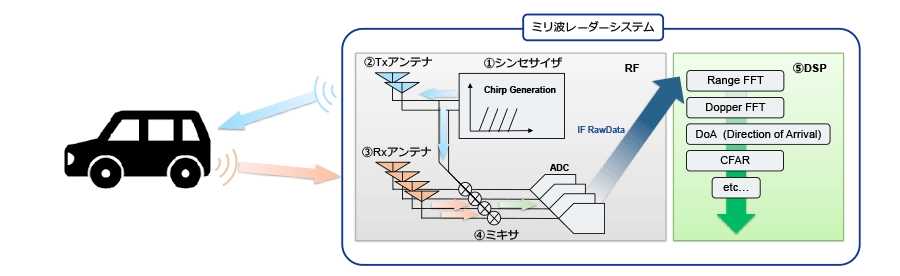 図1. ミリ波レーダの構成
図1. ミリ波レーダの構成
ミリ波レーダーでは、以下手順にて各情報を取得します(実装する信号処理内容等により詳細は異なります)
① シンセサイザから変調波(送信波)を生成
② Txアンテナより変調波を送信
③ 変調波が物標にあたり反射、Rxアンテナにて物標からの反射波を受信
④ ミキサにて送信波と受信波を比較し、IF(中間周波数)信号を生成
⑤ IF信号をADCにかけ得られたデータを元に、DSPにて各種信号処理を実施し位置・速度情報等を取得
センシング原理の詳細
先ほどのセンシング原理の詳細を紹介します。
図1-①にて、シンセサイザにより送信波として変調波(周波数変調)が生成されます。一般的に、送受信した電波によって物標を検知するシステムをレーダーと呼びます。レーダーにおいて、単なる正弦波の送信では送受信信号間で比較ができず、物標の距離や速度の検出を行うことができません。そのため、何らかの形で送信電波を変調が必要となります。ここでFMCW(周波数連続変調)と呼ばれる変調方式についてご紹介します。
FMCW(周波数連続変調)方式
FMCW(周波数連続変調)方式は、時間の経過に応じて周波数が上昇するように電波を変調させる方式です。この変調を行った送信波をチャープと呼びます。
他の変調方式と比較し、距離と速度測定が同時に可能、回路構成が容易、比較的少ない信号処理で高距離分解能を実現可能などの特徴があります。
FMCW方式では、送受信信号から生成されるIF信号に対して信号処理をかけることで距離や速度、角度を検出することができます。
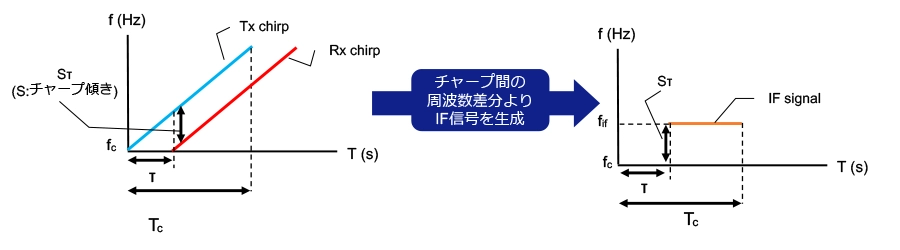 図2. FMCW方式、IF信号
図2. FMCW方式、IF信号
距離・速度・角度の検出
ここからは、ミリ波レーダがIF信号を基にどのようにして距離や速度等の情報を取得しているのか詳しく見ていきます。
- 距離検出
距離はIF信号周波数から検出することができます。
図3は1送信波に対して距離が異なる3つの物標から反射波を受信している様子です。
各反射波が得られるまでの時間は、距離に応じてそれぞれずれます。そのため、送受信信号を比較した際、それぞれの反射波ごと異なる周波数のIFトーンが生成され、それらをすべて合成したものが最終的なIF信号となります。
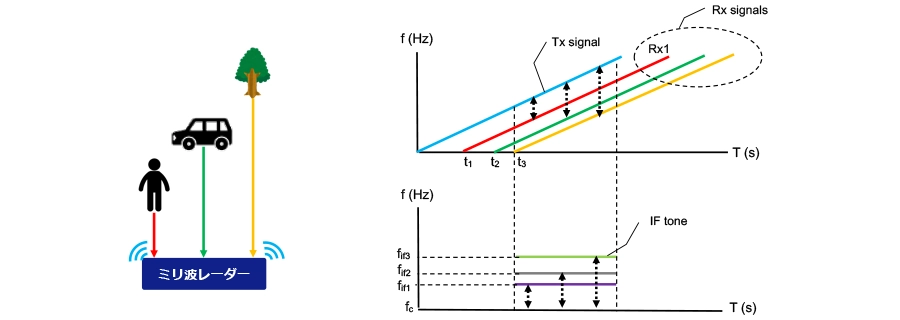 図3. IF信号生成イメージ
図3. IF信号生成イメージ
- 生成されたIF信号をADC変換後、DSPなどでの後段処理にてフーリエ変換 (FFT)を行う事によりトーンごとに異なる周波数スペクトルが得られます。その結果から物標ごとの距離情報を計算することができます。
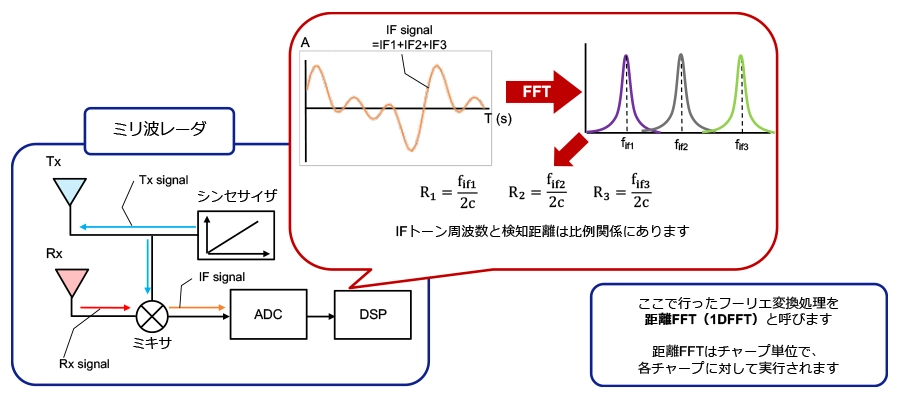 図4. 距離FFT
図4. 距離FFT
- 速度検出
距離検出と同様に、得られたセンシングデータからFFT処理を行う事により速度情報を得ることができます。
例として、アンテナ面から遠ざかる1つの物標の速度検出について見ていきます。
速度の算出は以下のようにTcの間隔で送信される2本のチャープを使用し、移動中の物標のある2点から取得できるIF信号の位相差から検出します。
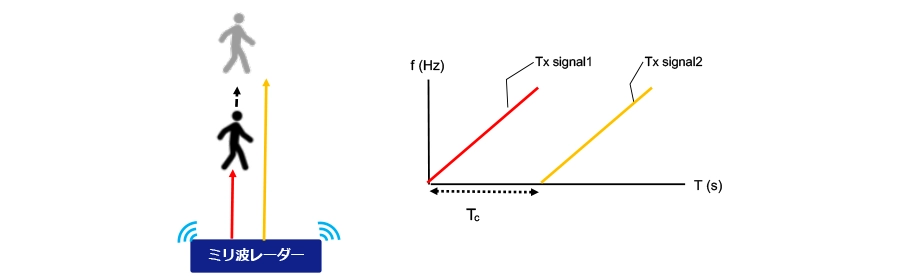 図5. 複数チャープでの速度検知
図5. 複数チャープでの速度検知
- ここでチャープを周波数-時間プロットではなく、振幅-位相プロットで見ていき、IF信号の位相に着目します。
IF信号の位相は下記グラフのように、送信したTxチャープと受信したRxチャープの位相差より決定されます。
以下の図の場合、Rxチャープ受信開始時の位相がTxと等しいため、位相差は0となりIF信号の位相はTxチャープのものと等しくなります。
 図6. IF信号の位相①
図6. IF信号の位相①
- 次に2本目のチャープから得られる(つまり物標が移動した後に得られる)IF信号を見ていきます。
物標が移動してアンテナ面から遠ざかり、Rx受信までの時間が先ほどからΔτだけ増えた場合を考えます。
以下の図のように、Δτによる受信タイミングの遅延によりTx・Rx間の位相に変化が生まれ、これによりIF信号の位相差が生じます。
この位相差を基に、速度を算出することができます。
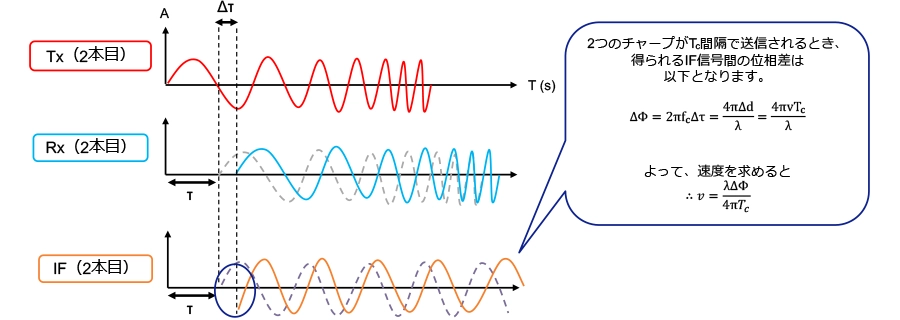 図7. IF信号の位相②
図7. IF信号の位相②
- 次に、複数の物標の速度を検出する方法を見ていきます。
ここでは測定時に2つの物標が異なる速度で動き、移動前後の位置がそれぞれレーダから見て同距離に存在するケースを考えます。
この場合、2つのチャープから生成されるIF信号1, 2に距離FFT処理すると、同じ位置にピークが現れることになり、距離の観点では対象物を個別に検知することはできません。
ところで、距離FFT後のデータには位相情報がベクトルとして含まれています(このケースでは2つの物標の位相情報が合成ベクトルとして含まれています)。これを利用することでそれぞれの物標の速度および移動方向を検知できます。
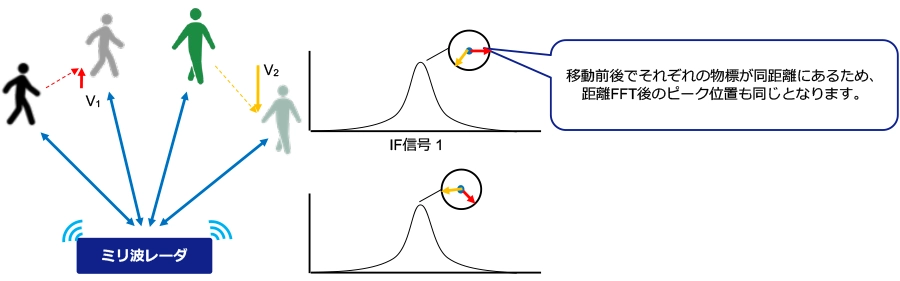 図8. 複数物標からのIF信号
図8. 複数物標からのIF信号
- 送信チャープを一定間隔でN回送信し、その間に移動した物標から得られたIF信号はN回位相変化を繰り返します。
この間の位相変化の累積より、角周波数ωを算出することができます。つまり、距離FFT後のデータに対してさらにFFTをかける事により、以下のようにω1、ω2の2つのピークを取得することができ、そこから各物標の速度を求めることができます。
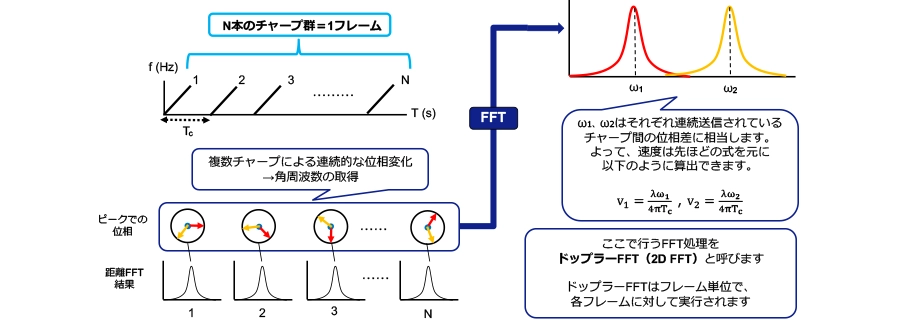 図9. ドップラーFFT
図9. ドップラーFFT
- 角度検出
最後に角度を検出する方法を見ていきましょう。
角度検出は複数の受信アンテナを用いて、各アンテナ間における位相差を検出することで実現します。以下の図のように、ある受信アンテナ(Rx1)から他の受信アンテナ(Rx2)を見たとき、信号を受信するまでの距離に差が生じます。
この距離差が先ほどの速度検出の際の物標移動距離に相当し、同様に位相差を算出できます。
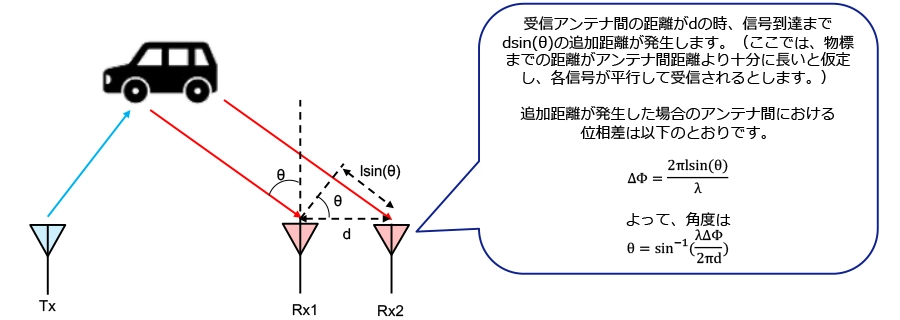 図10. 複数受信アンテナにおける位相差の発生
図10. 複数受信アンテナにおける位相差の発生
- 速度検出時と同様に、同距離かつ同速度にある複数の物標からの位相差を比較する場合、IF信号間でピーク位置が同一なため、それぞれのIF信号間の位相を単純比較できません。そこで受信アンテナを複数用意し、それぞれのアンテナにおけるドップラーFFT結果のすべてに対してさらにFFTをかけます。その結果、角周波数ωのピークを取得でき、位相差として角度を算出できます。
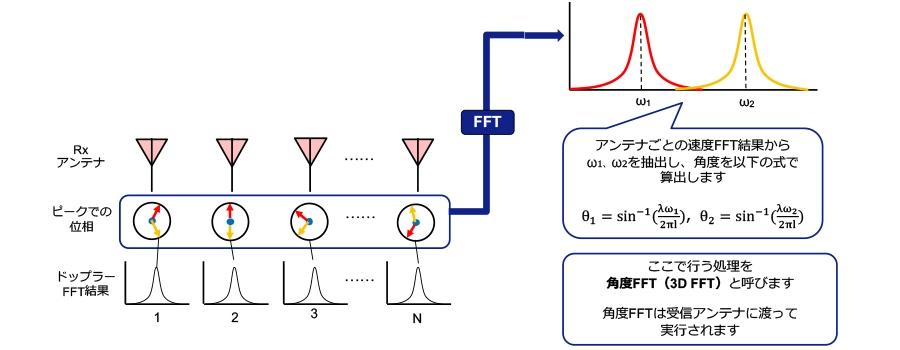 図11. 角度FFT
図11. 角度FFT
まとめ
以上、距離・速度・角度のセンシング方法をご紹介しました。図12が信号処理部のフローとなります。ご紹介した3つのFFTにより、様々な距離、速度条件下で位置を検出することが可能になっています。なお、ご紹介した一連のFFTはミリ波レーダーにおける一般的な概念であり、必ずしも同じ方式が用いられているわけではありません。ミリ波レーダーで実現するアプリケーションによっては、FFT処理順序や内容などアプリケーションごとに独自に実装・追加する必要があります。
また、必要に応じて
・信号のフィルタリング
・各FFTの前処理(ウィンドウ処理)、後処理(ピーク検出:CFAR)
・検知した点群のクラスタリング(グループ化)、トラッキング(追跡)
・アプリケーション独自の判定処理
等のソフトウェア処理を追加することで、アプリケーションとしての”味付け”をしていくことになります。
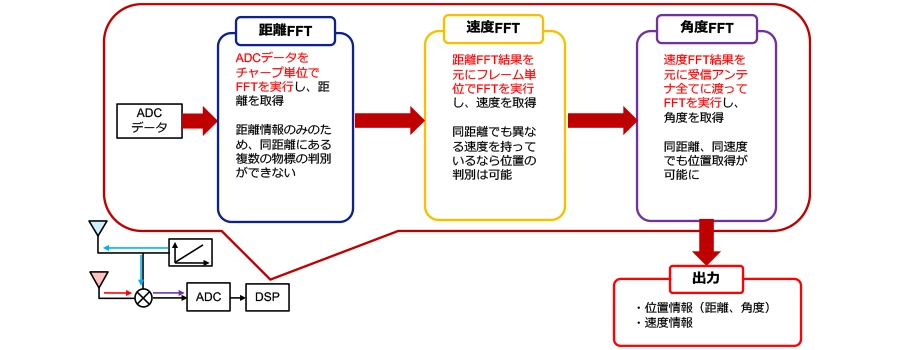 図12. ミリ波レーダーの信号処理フロー
図12. ミリ波レーダーの信号処理フロー