【エッジAI基礎 × eYs3D】ロボット開発を加速するフレームワーク「ROS」とは?


目次
1. はじめに:ROSとは

ROS(Robot Operating System)は、ロボット開発を効率化するオープンソースのフレームワークです。名称にOSが含まれていますが、WindowsやLinuxのような一般的なオペレーティングシステムとは異なります。ROSは、ロボットのソフトウェア開発に必要なツールやライブラリを豊富に提供し、開発者がより簡単にロボットを構築できるように支援します。
2. ROSの概要
ROSは、ロボットのハードウェアとソフトウェアを抽象化し、モジュール単位で開発を進めることができます。独立したプロセス(ノード)がメッセージを介して通信する仕組みで、複雑なシステムを機能ごとに分割して開発し、柔軟に組み合わせることが可能です。例えば、お掃除ロボットでは、部屋のマッピング・ゴミ検知・掃除経路計画・充電ステーションへの帰還などをそれぞれ独立したノードとして開発し、連携させることができます。
ROSには、ROS1とROS2という2つの主要なバージョンがあります。長年利用されてきたROS1に対し、ROS2はリアルタイム性と信頼性が向上しています。ROS2では、通信ミドルウェアの刷新により、大規模システムやリアルタイム性が求められるシステムへの対応力が強化されました。
ROS2はWindows環境にも対応しており、ROS開発の裾野がさらに広がっています。しかし、ROSの機能を最大限に活用し、開発をスムーズに進めるためには、Linux環境、特にUbuntuがおすすめです。Ubuntuは、ROSの初期の頃から主要な開発プラットフォームとして採用されてきた歴史があり、ROSコミュニティによるサポートが活発で、関連情報も豊富です。さらに、開発に必要なツールやライブラリが容易に利用できます。
3. SLAM:自己位置推定と環境地図作成
ROSは、SLAM(Simultaneous Localization and Mapping)と呼ばれる技術の開発にも広く活用されています。これは、日本語で「自己位置推定と環境地図作成の同時実行」という意味です。具体的には、ロボットがセンサーを使って周囲の環境を認識し、自分の位置を推定しながら、同時に環境の地図を作成していきます。人間でいうと、目を使って周囲を見ながら、自分がどこにいるのかを把握し、頭の中で地図を描きながら歩いているようなイメージです。
ROSは、SLAMを実現するための様々なツールやライブラリを提供しています。例えば、レーザーセンサーやカメラなどのセンサーデータ処理・SLAMアルゴリズムの実装・地図データの保存と可視化など、SLAMに必要な機能をROSで実現することができます。さらに、ROSはSLAMで作成された地図情報を利用して、ロボットが目的地まで効率的に移動するための、経路計画の機能も提供しています。経路計画では、障害物や通行可能な領域などの情報をもとに、最適な経路を計算します。
4. Rviz:ロボットの状況を「見える化」する機能
Rvizは、ROSで利用できる2D/3D可視化ツールで、SLAMの過程を可視化することができます。具体的には、ロボットが取得したセンサーデータ・SLAMアルゴリズムによって生成された地図・ロボットの自己位置推定などをリアルタイムに表示します。これにより、SLAMアルゴリズムが正しく動作しているか、問題が発生していないかを視覚的に確認できます。ROS1に対応するRvizと、ROS2に対応するRviz2があります。

SLAMの地図情報をもとに、赤矢印で示されるゴールへと経路計画をして進みます。ロボット視点のカメラ映像も確認できます。
5. ROSのメリット:多岐にわたるロボット開発を支援
ROSはその柔軟性と拡張性から、多岐にわたるロボット開発を支援します。センサーからのデータを統合し、効率的なナビゲーションや障害物回避が可能になります。また、リアルタイムでデータを処理することで、環境の変化に適応した動作が実現できます。
|
|
|
|
|



6. eCV5546:エッジAIによるロボットの高性能化
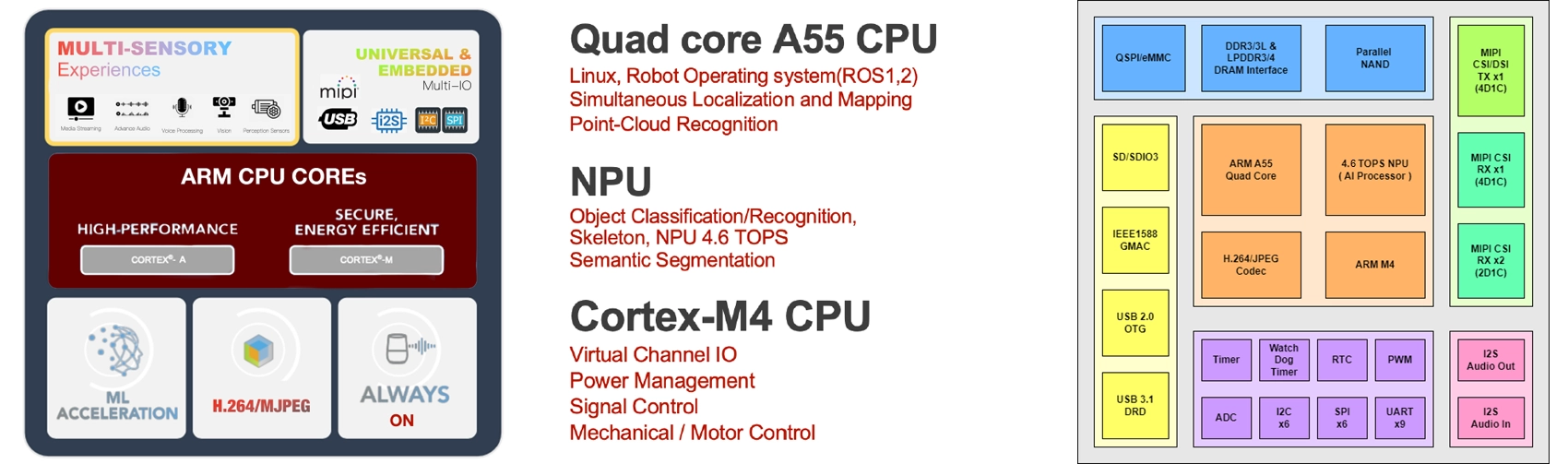
eYs3D社のエッジAI SoC「eCV5546」は、Quad Cortex-A55@1.8GHz、Cortex-M4@400MHz、NPU(Neural Processing Unit)を内蔵し、ROSと連携することで高度なロボットシステムを実現します。
- 機能分担例:
- Cortex-A55: ROS, SLAM, Rvizや障害物検知などの処理
- Cortex-M4: モータードライバーのリアルタイム制御
- NPU: AI画像認識、センサーデータのフィルター処理(並列処理ユニットPPU(Parallel Processing Unit)を内蔵)
eCV5546を活用することで、センサーデータの高速処理、リアルタイムSLAM、高度な物体認識などがロボット側で実行可能となり、クラウドへの依存度を低減し、リアルタイム性とセキュリティを向上させることができます。
eCV5546を用いたエッジAIプラットフォームXINK V2が提供されています。
7. まとめ
ROSはロボット開発を大きく加速するフレームワークです。多様なツール群、豊富なライブラリ、そして活発なコミュニティによって、開発者はロボット開発の課題を効率的に解決することができます。ROSとeCV5546を組み合わせることで、さらに高度なロボットシステムの構築が可能になります。また、以下の関連記事もご覧ください。
関連商品
 eYs3D Microelectronics: 3DマシンビジョンとエッジAIで未来を拓く
eYs3D Microelectronics: 3DマシンビジョンとエッジAIで未来を拓く
 【AI: Computer Vision】eYs3D XINKデモを動かしてみた
【AI: Computer Vision】eYs3D XINKデモを動かしてみた

